This tutorial implements a simple optical flow algorithm based on tracking interest points from one video frame to the next. This can be used either to detect moving objects in video when the camera is stationary, or to detect when the camera itself is moving.
This tutorial also aims at demonstrating how one can easily port other Python OpenCV tutorials to JeVois.

Example of tracked interest points over a movie sequence. Image from OpenCV documentation (see link below).
Approach
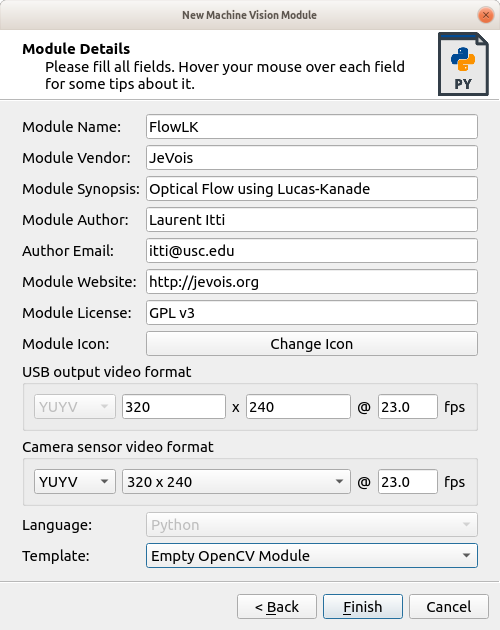
Creating the module
Analyzing the original code
We start by reading the tutorial at https://docs.opencv.org/4.0.0-alpha/d7/d8b/tutorial_py_lucas_kanade.html
Here is the first piece of code from that tutorial:
import numpy as np
import cv2 as cv
cap = cv.VideoCapture('slow.flv')
feature_params = dict( maxCorners = 100,
qualityLevel = 0.3,
minDistance = 7,
blockSize = 7 )
lk_params = dict( winSize = (15,15),
maxLevel = 2,
criteria = (cv.TERM_CRITERIA_EPS | cv.TERM_CRITERIA_COUNT, 10, 0.03))
color = np.random.randint(0,255,(100,3))
ret, old_frame = cap.read()
old_gray = cv.cvtColor(old_frame, cv.COLOR_BGR2GRAY)
p0 = cv.goodFeaturesToTrack(old_gray, mask = None, **feature_params)
mask = np.zeros_like(old_frame)
while(1):
ret,frame = cap.read()
frame_gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY)
p1, st, err = cv.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)
good_new = p1[st==1]
good_old = p0[st==1]
for i,(new,old) in enumerate(zip(good_new,good_old)):
a,b = new.ravel()
c,d = old.ravel()
mask = cv.line(mask, (a,b),(c,d), color[i].tolist(), 2)
frame = cv.circle(frame,(a,b),5,color[i].tolist(),-1)
img = cv.add(frame,mask)
cv.imshow('frame',img)
k = cv.waitKey(30) & 0xff
if k == 27:
break
old_gray = frame_gray.copy()
p0 = good_new.reshape(-1,1,2)
cv.destroyAllWindows()
cap.release()
To port the code to JeVois, we need to address the following:
- Our JeVois module is a Python class, with class member functions, such as
process() called on every frame. This means that:
- the JeVois engine runs the main loop of grabbing images, sending them to processing (our module), and sending the results to the host computer over USB. Hence, we will delete any code related to:
- Instead of global variables (or variables created outside the main loop), we will use class member variables (with name like self.var). We initialize these in the constructor of our module: member function
__init__(self).
Looking at the original code, there are two phases in this algorithm:
- Once when the program starts, grab a video frame and detect some interest points using
goodFeaturesToTrack(), which finds a number of fairly unique-looking points that we hope can be seen again on the next video frame, even though the camera or the objects might have moved a little.
- Then, on every subsequent frame, those points are tracked using
calcOpticalFlowPyrLK(). The resulting set of points (which possibly have moved a bit) replaces the old set of points, so that the new set can be tracked on the next video frame.
JeVois does not allow one to just grab a frame during initialization. The only time we get to process frames is when the module's process() function is called. So we will instead decide on what to do (extract good features to track, or track them) inside process(), based on whether a member variable self.old_gray exists or not:
- On the first frame (first call to
process()), it does not exist and we then find the good features to track and also create self.old_gray;
- On subsequent frames, self.old_gray exists and we use that as a cue to now track the detected points.
- A small detail: in this example the authors imported cv2 as cv (i.e., they use prefix
cv. for OpenCV functions) while we usually just import cv2 (and use prefix cv2.).
- One last small detail is that variable p1 would become
NoneType when all the tracked points have disappeared from the field of view. This gave rise to an exception when trying to subindex p1 in the line good_new = p1[st==1]; hence, in our module, we add a test if p1 is None: in which we just delete self.old_gray, which will trigger finding new good points to track on the next call to process().
Writing the JeVois code
import libjevois as jevois
import cv2
import numpy as np
class FlowLK:
def __init__(self):
self.feature_params = dict( maxCorners = 100,
qualityLevel = 0.3,
minDistance = 7,
blockSize = 7 )
self.lk_params = dict( winSize = (15,15),
maxLevel = 2,
criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
self.color = np.random.randint(0,255,(100,3))
def process(self, inframe, outframe):
frame = inframe.getCvBGR()
self.timer.start()
if not hasattr(self, 'old_gray'):
self.old_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
self.p0 = cv2.goodFeaturesToTrack(self.old_gray, mask = None, **self.feature_params)
self.mask = np.zeros_like(frame)
else:
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
p1, st, err = cv2.calcOpticalFlowPyrLK(self.old_gray, frame_gray, self.p0, None, **self.lk_params)
if p1 is None:
frame = cv2.add(frame, self.mask)
del self.old_gray
else:
good_new = p1[st==1]
good_old = self.p0[st==1]
for i,(new, old) in enumerate(zip(good_new, good_old)):
a,b = new.ravel()
c,d = old.ravel()
self.mask = cv2.line(self.mask, (a,b),(c,d), self.color[i].tolist(), 2)
frame = cv2.circle(frame, (a,b), 5, self.color[i].tolist(), -1)
frame = cv2.add(frame, self.mask)
self.old_gray = frame_gray.copy()
self.p0 = good_new.reshape(-1, 1, 2)
fps = self.timer.stop()
cv2.putText(frame, fps, (3,frame.shape[0]-7), cv2.FONT_HERSHEY_SIMPLEX,
0.4, (255,255,255), 1, cv2.LINE_AA)
outframe.sendCv(frame)
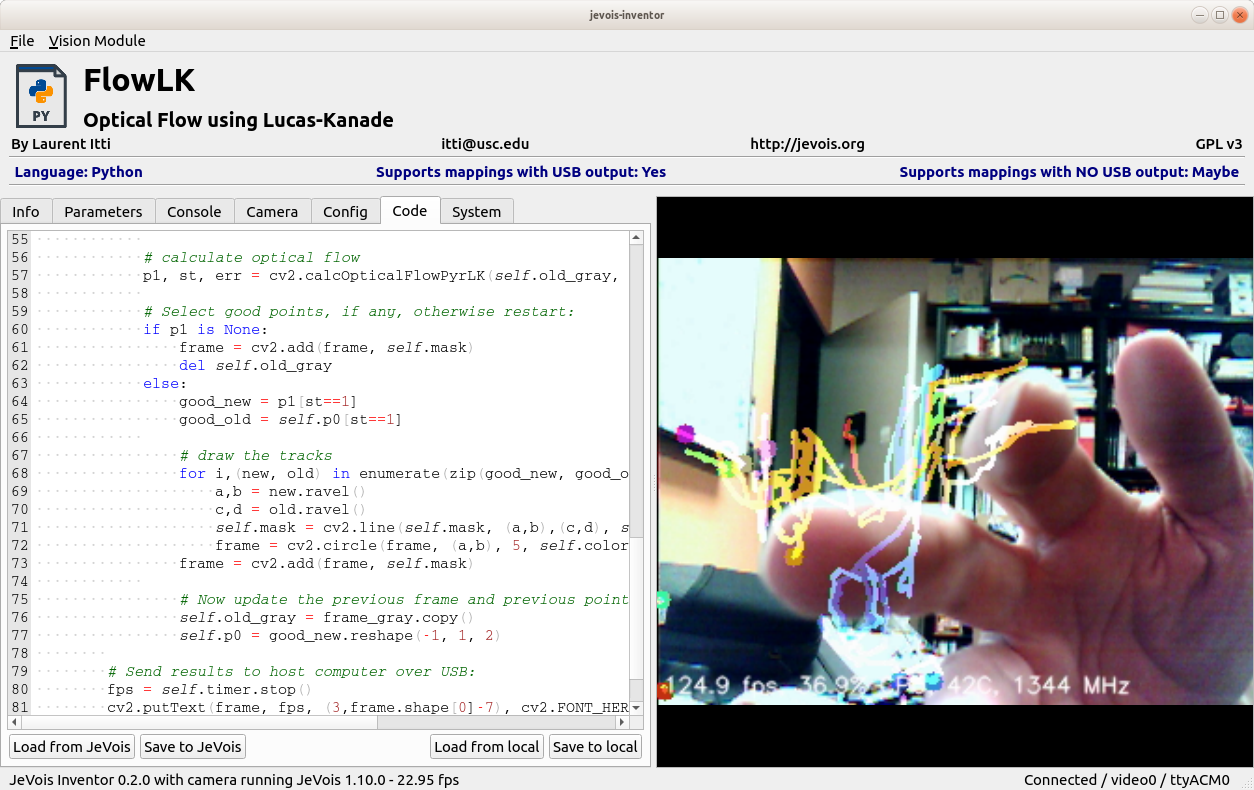
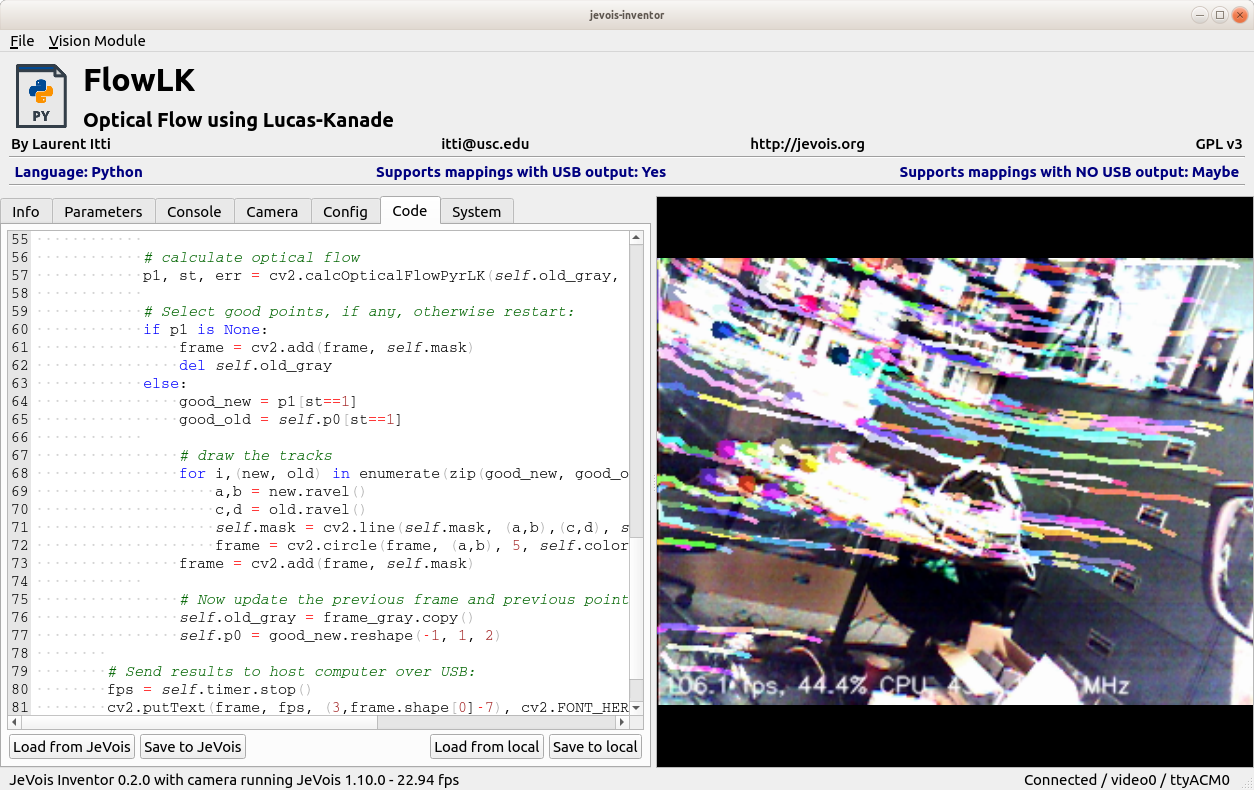
And here we go!
Quite fast actually, 80 to 140 frames/s depending on how many points get tracked.
Going further
- Try the dense optical flow computation which is in the second part of the OpenCV tutorial studied here.
- Try to port other OpenCV tutorials to JeVois.


 1.9.8
1.9.8
{kind=link}
{kind=link}
{kind=link}