|
JeVois
1.23
JeVois Smart Embedded Machine Vision Toolkit
|
|
|
JeVois
1.23
JeVois Smart Embedded Machine Vision Toolkit
|
|
The MicroSD card in your JeVois smart camera contains all the software that runs on the smart camera's processor. This includes:
Modifying the contents of your MicroSD card, for example to add new machine vision modules or to get video files that were recorded by JeVois, is achieved by taking the MicroSD card out of your JeVois smart camera and connecting it to a desktop or laptop computer.


There are two basic ways of accessing the MicroSD card on a desktop or laptop:



The card is organized into three partitions (logical volumes):
Because the LINUX partition is of type ext4, which is the native file system for Linux, but is not recognized by default on Windows and Mac, when you read your MicroSD card on a Windows or Mac computer, you may not be able to see it or to access it. That is usually not a problem as only advanced hackers (who will be programming on Linux computers) would ever need to modify the contents of the LINUX partition.
For regular users, all you need is in the JEVOIS partition, as further detailed below.
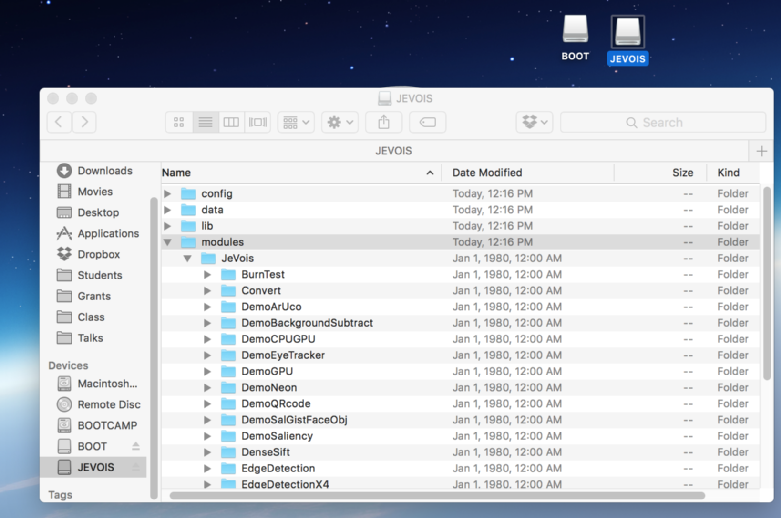
Here is an example of what happens on a Mac laptop when you insert the MicroSD card: Two volumes appear, BOOT and JEVOIS, and one can browse the files in both of them. The LINUX volume does not appear on this Mac (but note that third party apps are available to allow Macs to read ext4 partitions as well).
Here is an abbreviated tree of the files present on a typical JeVois-A33 microSD card ( JeVois-Pro is similar but not identical):
├── BOOT ########## (16 MB FAT32 partition) │ ├── README.txt # information file for Windows users who may not see the JEVOIS partition │ ├── script.bin # low-level hardware configuration file │ ├── uEnv.txt # optional command-line arguments for the Linux Kernel │ └── uImage # Linux kernel ├── LINUX ########## (1 GB Linux ext4 partition) │ ├── bin ### Directory for standard Unix commands │ │ ├── ash # some Unix command │ │ ├── bash # some other Unix command │ │ ├── busybox # ... │ │ ├── cat ... │ ├── etc ### Directory for Unix configuration files │ │ ├── fstab │ │ ├── group │ │ ├── hostname │ │ ├── hosts ... │ ├── lib ### Directory for Unix system libraries │ │ ├── ld-2.23.so │ │ ├── ld-linux-armhf.so.3 │ │ ├── libatomic.so.1.2.0 │ │ ├── libc-2.23.so │ │ ├── libcrypt-2.23.so │ │ ├── libc.so.6 │ │ ├── libdl-2.23.so │ │ ├── libgcc_s.so │ │ ├── libm-2.23.so │ │ ├── libm.so.6 │ │ ├── libnsl-2.23.so ... │ ├── sbin ### Directory for system administration Unix commands │ │ ├── arp │ │ ├── blkid │ │ ├── devmem │ │ ├── fdisk │ │ ├── freeramdisk │ │ ├── fsck ... │ ├── tmp ### Scratch directory for temporary files │ ├── usr ### Directory for user Unix commands and shared data │ │ ├── bin │ │ │ ├── ar │ │ │ ├── attr │ │ │ ├── awk │ │ │ ├── basename │ │ │ ├── bunzip2 │ │ │ ├── bzcat ... │ │ ├── lib ### Directory for Unix user libraries │ │ │ ├── libattr.so.1.1.0 │ │ │ ├── libavcodec.so.56.60.100 │ │ │ ├── libavdevice.so.56.4.100 │ │ │ ├── libavfilter.so.5.40.101 │ │ │ ├── libavformat.so.56.40.101 │ │ │ ├── libavheap.so │ │ │ ├── libavresample.so.2.1.0 │ │ │ ├── libavutil.so.54.31.100 │ │ │ ├── libbfd-2.25.51.so │ │ │ ├── libbfd-2.26.1.so │ │ │ ├── libblas.so │ │ │ ├── libboost_atomic.so.1.61.0 │ │ │ ├── libboost_chrono.so.1.61.0 │ │ │ ├── libboost_container.so.1.61.0 ... │ │ ├── sbin │ │ │ ├── addgroup ### Directory for more Unix system administration commands │ │ │ ├── adduser │ │ │ ├── arping │ │ │ ├── chroot ... │ │ └── share ### Directory for shared data used by Unix commands │ │ ├── awk │ │ │ ├── assert.awk │ │ │ ├── bits2str.awk │ │ │ ├── cliff_rand.awk │ │ │ ├── ctime.awk │ │ │ ├── ftrans.awk │ │ │ ├── getopt.awk │ │ │ ├── gettime.awk ... │ └── var ### Directory for Unix system log files and other volatile files │ ├── cache │ ├── lib │ │ └── misc │ ├── lock │ ├── log │ ├── run │ ├── spool │ └── tmp ├── JEVOIS ########## (6+ GB FAT32 partition) │ ├── config ### Directory for JeVois engine configuration file │ │ ├── initscript.cfg │ │ ├── JeVois.cmake │ │ ├── jevois_config.cmake │ │ ├── params.cfg │ │ └── videomappings.cfg │ ├── data ### Directory for optional user data, some JeVois modules also save outputs into it │ ├── lib ### Directory for JeVois libraries, i.e., collections of shared vision algorithms │ │ └── JeVois # One sub-directory for each JeVois "Vendor" (provider of JeVois modules) │ │ └── libjevoisbase.so.1.0 │ ├── modules ### Directory for JeVois machine vision modules │ │ └── JeVois # One sub-directory for each JeVois "Vendor" (provider of JeVois modules) │ │ ├── Convert # One directory for each module │ │ │ ├── Convert.so # The compiled module code that will be loaded when that module is selected │ │ │ ├── icon.png # Extra data about the module │ │ │ ├── modinfo.html │ │ │ ├── modinfo.yaml │ │ │ └── screenshot1.png │ │ ├── DemoArUco │ │ │ ├── calibration.yaml │ │ │ ├── DemoArUco.so │ │ │ ├── icon.png │ │ │ ├── modinfo.html │ │ │ ├── modinfo.yaml │ │ │ ├── screenshot1.png │ │ │ └── screenshot2.png │ │ ├── DemoGPU │ │ │ ├── DemoGPU.so │ │ │ ├── icon.png │ │ │ ├── modinfo.html │ │ │ ├── modinfo.yaml │ │ │ ├── screenshot1.png │ │ │ ├── shaders # This module uses auxiliary files for GPU shader code │ │ │ │ ├── blurfragshader.glsl │ │ │ │ ├── dilatefragshader.glsl │ │ │ │ ├── erodefragshader.glsl │ │ │ │ ├── medianfragshader.glsl │ │ │ │ ├── multfragshader.glsl │ │ │ │ ├── simplefragshader.glsl │ │ │ │ ├── simplevertshader.glsl │ │ │ │ ├── sobelfragshader.glsl │ │ │ │ ├── threshfragshader.glsl │ │ │ │ ├── twirlfragshader.glsl │ │ │ │ └── yuvfragshader.glsl │ │ │ └── video1.mkv ... │ │ ├── DemoSalGistFaceObj │ │ │ ├── DemoSalGistFaceObj.so │ │ │ ├── facedetector │ │ │ │ ├── haarcascade_eye_tree_eyeglasses.xml │ │ │ │ └── haarcascade_frontalface_alt.xml │ │ │ ├── icon.png │ │ │ ├── modinfo.html │ │ │ ├── modinfo.yaml │ │ │ ├── movie.avi │ │ │ ├── screenshot1.png │ │ │ └── tiny-dnn # This module uses auxiliary files for neural network data │ │ │ ├── CIFAR10 │ │ │ │ ├── batches.meta.txt │ │ │ │ ├── data_batch_1.bin │ │ │ │ ├── data_batch_2.bin │ │ │ │ ├── data_batch_3.bin │ │ │ │ ├── data_batch_4.bin │ │ │ │ ├── data_batch_5.bin │ │ │ │ ├── readme.html │ │ │ │ ├── test_batch.bin │ │ │ │ └── weights.tnn │ │ │ └── MNIST │ │ │ ├── t10k-images.idx3-ubyte │ │ │ ├── t10k-labels.idx1-ubyte │ │ │ ├── train-images.idx3-ubyte │ │ │ ├── train-labels.idx1-ubyte │ │ │ └── weights.tnn ... │ │ ├── SaliencySURF │ │ │ ├── icon.png │ │ │ ├── images # Images of the things this module can recognize │ │ │ │ ├── books.png │ │ │ │ ├── doorframe.png │ │ │ │ ├── doorlock2.png │ │ │ │ ├── doorlock.png │ │ │ │ ├── lightswitch2.png │ │ │ │ ├── lightswitch.png │ │ │ │ ├── spot25.png │ │ │ │ ├── spot26.png │ │ │ │ └── usbbatt.png │ │ │ ├── modinfo.html │ │ │ ├── modinfo.yaml │ │ │ ├── params.cfg │ │ │ ├── SaliencySURF.so │ │ │ └── screenshot1.png ... │ ├── packages ### Simply copy downloaded .jvpkg files here and JeVois will unpack and install them │ └── scripts │ ├── astylerc │ ├── docinstall.sh │ ├── extract-code-snippets.pl │ ├── jevois-modinfo.pl │ └── list-sources.sh ...
If you have a card larger than the image sizes we provide, you may want to resize the JEVOIS or JEVOISPRO partition to use all available free space on your card.
The JEVOIS or JEVOISPRO partition is using a VFAT/FAT32 filesystem for greatest compatibility with a variety of hosts. To resize it under Linux, use gparted (you may have to first install it with sudo apt install gparted).
JeVois-A33 JeVois v1.1
You can access the contents of the JEVOIS partition on the microSD while the card is inside your JeVois smart camera. JeVois can (on demand) make the JEVOIS partition visible to a connected host computer over USB, as a virtual USB flash drive.
To enable this feature, connect to the JeVois command-line interface (see Command-line interface user guide) and issue the command:
usbsd
You will notice that a new USB flash drive is detected by your host computer.
On Linux and with JeVois v1.2 and later, you can use host command jevois-usbsd start to instruct a connected JeVois camera to start exporting its microSD, without having to open a serial terminal application and to connect to JeVois. Likewise, you can issue jevois-usbsd stop to release the card and restart JeVois.
Typical workflow is as follows:
usbsd command. The virtual USB flash drive will appear on your host computer.jevois-usbsd start directly from any Linux shell../rebuild-platform.sh to JEVOIS:/packages/ 1.9.8
1.9.8

{kind=link}
{kind=link}