|
| By Laurent Itti | itti@usc.edu | http://jevois.org | GPL v3 |
| |||
| Video Mapping: YUYV 640 252 60.0 YUYV 320 240 60.0 JeVois FirstPython | |||
| Video Mapping: YUYV 320 252 60.0 YUYV 320 240 60.0 JeVois FirstPython |
Module Documentation
This module is a simplified version of the C++ module FirstVision. It is available with JeVois v1.6.2 or later.
This module implements a simple color-based object detector using OpenCV in Python. Its main goal is to also demonstrate full 6D pose recovery of the detected object, in Python.
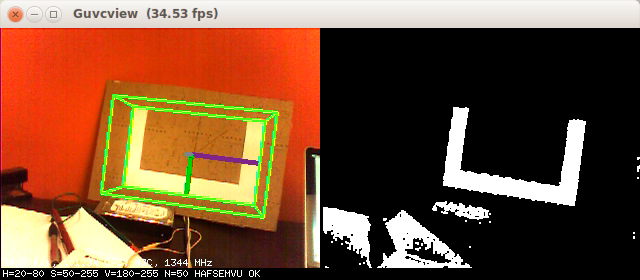
This module isolates pixels within a given HSV range (hue, saturation, and value of color pixels), does some cleanups, and extracts object contours. It is looking for a rectangular U shape of a specific size (set by parameters owm and ohm for object width and height in meters). See screenshots for an example of shape. It sends information about detected objects over serial.
This module usually works best with the camera sensor set to manual exposure, manual gain, manual color balance, etc so that HSV color values are reliable. See the file script.cfg file in this module's directory for an example of how to set the camera settings each time this module is loaded.
This module is provided for inspiration. It has no pretension of actually solving the FIRST Robotics vision problem in a complete and reliable way. It is released in the hope that FRC teams will try it out and get inspired to develop something much better for their own robot.
Using this module
Check out this tutorial first, for the FirstVision module written in C++ and also check out the doc for FirstVision. Then you can just dive in and start editing the python code of FirstPython.
See http://jevois.org/tutorials for tutorials on getting started with programming JeVois in Python without having to install any development software on your host computer.
Trying it out
Edit the module's file at JEVOIS:/modules/JeVois/FirstPython/FirstPython.py and set the parameters self.owm and self.ohm to the physical width and height of your U-shaped object in meters. You should also review and edit the other parameters in the module's constructor, such as the range of HSV colors.
| Parameter | Type | Description | Default | Valid Values |
|---|---|---|---|---|
| This module exposes no parameter | ||||
script.cfg file# Demo configuration script for FirstPython module. # Set camera to fixed color balance, gain, and exposure, so that we get more reliable colors than we would obtain under # automatic mode: setcam presetwb 0 setcam autowb 0 setcam autogain 0 setcam autoexp 0 setcam redbal 110 setcam bluebal 170 setcam gain 16 setcam absexp 500 # Send info log messages to None, Hard, or USB serial port - useful for debugging: #setpar serlog None #setpar serlog Hard #setpar serlog USB # Send serial strings with detected objects to None, Hard, or USB serial port: #setpar serout None #setpar serout Hard #setpar serout USB |
| Detailed docs: | FirstPython |
|---|---|
| Copyright: | Copyright (C) 2018 by Laurent Itti, iLab and the University of Southern California |
| License: | GPL v3 |
| Distribution: | Unrestricted |
| Restrictions: | None |
| Support URL: | http://jevois.org/doc |
| Other URL: | http://iLab.usc.edu |
| Address: | University of Southern California, HNB-07A, 3641 Watt Way, Los Angeles, CA 90089-2520, USA |