Build a simple visually-guided toy robot car for under $100 with JeVois
In this tutorial we build a simple visually-guided robot car, using the cheapest possible mechanical components and compensating for their brittleness by using high-framerate, closed-loop vision processing.
As a first application, the toy robot card will detect, track, and follow ArUco markers (small 2D barcodes).
In this tutorial, you will learn:
How to design and build a simple autonomous vehicle with vision processing
How to program a simple visually-guided behavior on an Arduino
Theory of operation
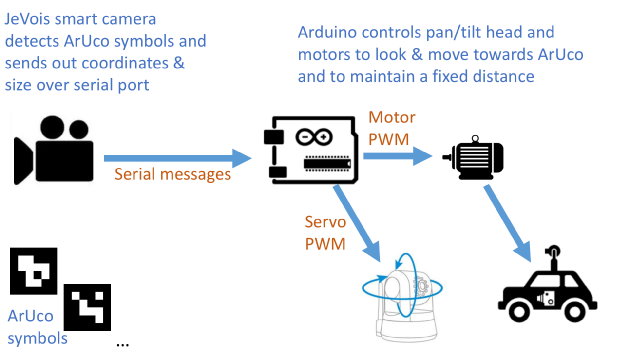
The robot car will feature a pan/tilt head onto which the JeVois camera will be mounted. This is so that we can very quickly track a moving target before it escapes out of the field of view of the JeVois camera, even though the car may be quite sluggish to turn and orient towards it.
JeVois will detect an ArUco marker and will communicate its coordinates and size to an Arduino responsible for control. The Arduino implements two PD (proportional, differential) controllers to control the pan-tilt head smoothly so that it tracks the moving target. The Arduino then also implements two PID (proportional, integral, differential) controllers to steer and move the car, so as to 1) maintain a fixed distance from the target and 2) steep to zero out any pan angle on the pan-tilt head (i.e., re-center the pan-tilt head by rotating the whole vehicle).
(Prices include shipping to the USA. Shipping to other countries may vary.)
Assembly
Assemble the car chassis per the provided instructions
Assemble the pan/tilt head per the provided instructions
Use the following Arduino connections:
Arduino pin
Connect to
RX
JeVois micro-serial port white wire
TX
JeVois micro-serial port yellow wire
VCC
JeVois micro-serial port red wire
GND
JeVois micro-serial port black wire
3
Motor driver PWM for left motor
2
Motor driver IN1 for left motor
21
Motor driver IN2 for left motor
5
Motor driver PWM for right motor
20
Motor driver IN1 for right motor
4
Motor driver IN2 for right motor
9
PWM control wire of pan servo
10
PWM control wire of tilt servo
Note
The pins used leave enough free pins to connect an optional additional SPI OLED screen should you want to have one on your robot. Search for, e.g., 0.96" OLED SPI on eBay to find a screen.
Also connect the 6V power (from the 4xAA pack) to the power lines of the pan and tilt servos, and to the motor input voltage of the motor controller board. The Arduino and JeVois will be powered directly from the USB battery bank using the splitter mini + micro USB cable. Finally connect the Arduino GND (from USB battery) to motor GND (from 4xAA batteries).
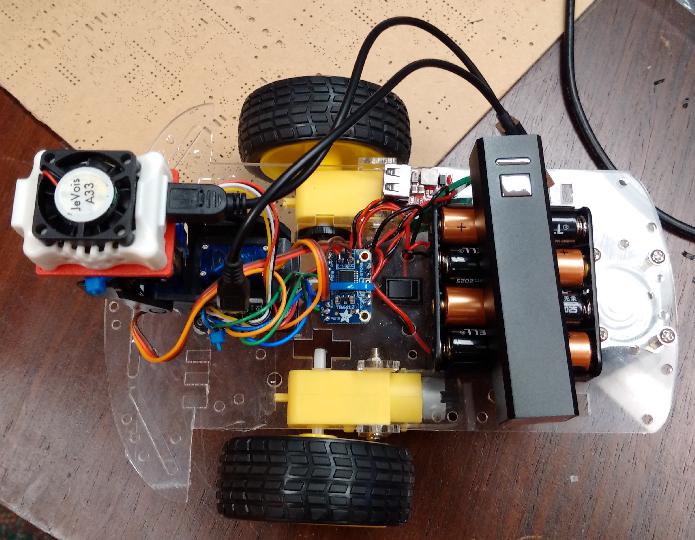
Your rig should roughly look as follows:
JeVois configuration
For our initial testing of this robot we will use the ArUco module with no USB output. Just edit JEVOIS:/config/initscript.cfg as follows:
setmapping2 YUYV 320 240 50.0 JeVois DemoArUco
setpar serlog None
setpar serout Hard
setpar serstyle Normal
streamon
Arduino code
We will use the Arduino PID Library by Brett Beauregard, make sure to install it in your Arduino IDE.
Here is a simple sketch to follow a single ArUco marker and to attempt to stay at a fixed distance from it:
We modify the code slightly to handle multiple targets. When we receive messages from JeVois about multiple targets, we keep track of the current ArUco ID that is tracked, and the next one that is being detected. Once the currently tracked one is close to us, we switch to tracking the next one. See the slightly modified logic in the loop() function of the modified code:



 1.9.8
1.9.8