|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
#include <jevoisbase/Components/Saliency/env_channel.h>#include <jevoisbase/Components/Saliency/env_c_math_ops.h>#include <jevoisbase/Components/Saliency/env_image_ops.h>#include <jevoisbase/Components/Saliency/env_log.h>#include <jevoisbase/Components/Saliency/env_params.h>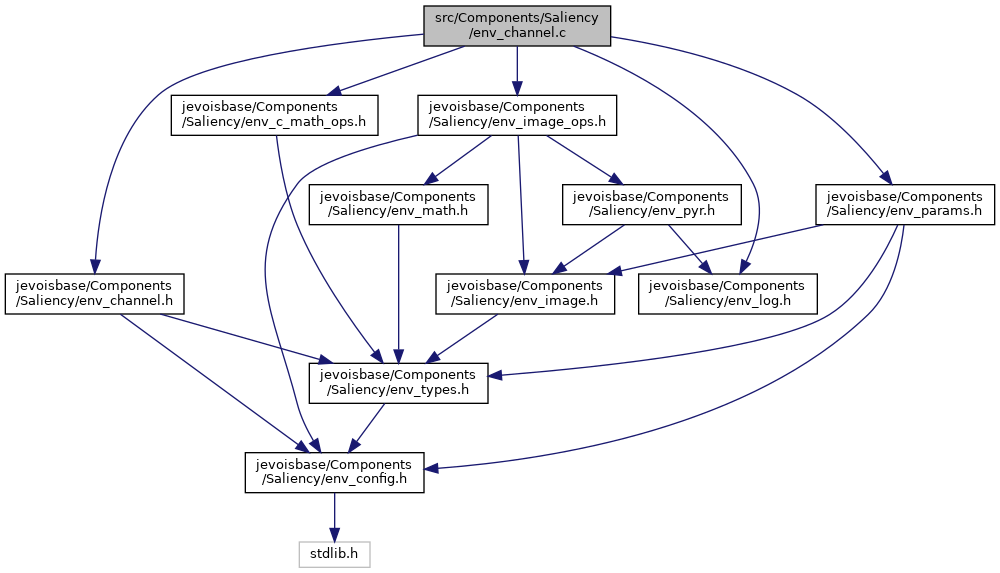
Go to the source code of this file.
Functions | |
| void | env_chan_process_pyr (const char *tagName, const struct env_dims inputDims, const struct env_pyr *pyr, const struct env_params *envp, const struct env_math *imath, const int takeAbs, const int normalizeOutput, struct env_image *result) |
| void | env_chan_intensity (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_dims inputdims, const struct env_pyr *lowpass5, const int normalizeOutput, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| An intensity channel. | |
| void | env_chan_color (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_rgb_pixel *const colimg, const struct env_dims dims, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| A double opponent color channel that combines r/g, b/y subchannels. | |
| void | env_chan_color_rgby (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_image *rg, const struct env_image *by, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| A double opponent color channel that combines r/g, b/y subchannels, with direct RG and BY inputs. | |
| void | env_chan_steerable (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_dims inputdims, const struct env_pyr *hipass9, const env_size_t thetaidx, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| An orientation filtering channel. | |
| void | env_chan_orientation (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_image *img, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| A composite channel with a set of steerable-filter subchannels. | |
| void | env_chan_flicker (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_image *prev, const struct env_image *cur, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| A temporal flicker channel. | |
| void | env_chan_msflicker (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_dims inputDims, const struct env_pyr *prev_lowpass5, const struct env_pyr *cur_lowpass5, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| A true multi-scale temporal flicker channel. | |
| void | env_chan_direction (const char *tagName, const struct env_params *envp, const struct env_math *imath, const struct env_dims inputdims, const struct env_pyr *unshiftedPrev, const struct env_pyr *unshiftedCur, const struct env_pyr *shiftedPrev, const struct env_pyr *shiftedCur, env_chan_status_func *status_func, void *status_userdata, struct env_image *result) |
| A motion sensitive channel with direction selectivity. | |
Base class for channels that will use integer math
Definition in file env_channel.c.
| void env_chan_color | ( | const char * | tagName, |
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const struct env_rgb_pixel *const | colimg, | ||
| const struct env_dims | dims, | ||
| env_chan_status_func * | status_func, | ||
| void * | status_userdata, | ||
| struct env_image * | result | ||
| ) |
A double opponent color channel that combines r/g, b/y subchannels.
Definition at line 218 of file env_channel.c.
References env_params::cs_lev_min, env_pyr::depth, env_image::dims, env_chan_intensity(), env_get_rgby(), env_img_init(), env_img_initializer, env_img_make_empty(), env_max_normalize_inplace(), env_max_pyr_depth(), env_pyr_build_lowpass_5(), env_pyr_init(), env_pyr_make_empty(), env_dims::h, INTMAXNORMMAX, INTMAXNORMMIN, env_params::maxnorm_type, env_math::nbits, env_params::range_thresh, and env_dims::w.
Referenced by Saliency::process().
| void env_chan_color_rgby | ( | const char * | tagName, |
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const struct env_image * | rg, | ||
| const struct env_image * | by, | ||
| env_chan_status_func * | status_func, | ||
| void * | status_userdata, | ||
| struct env_image * | result | ||
| ) |
A double opponent color channel that combines r/g, b/y subchannels, with direct RG and BY inputs.
Definition at line 269 of file env_channel.c.
References env_params::cs_lev_min, env_pyr::depth, env_image::dims, ENV_ASSERT, env_chan_intensity(), env_img_initializer, env_img_make_empty(), env_max_normalize_inplace(), env_max_pyr_depth(), env_pyr_build_lowpass_5(), env_pyr_init(), env_pyr_make_empty(), INTMAXNORMMAX, INTMAXNORMMIN, env_params::maxnorm_type, and env_params::range_thresh.
| void env_chan_direction | ( | const char * | tagName, |
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const struct env_dims | inputdims, | ||
| const struct env_pyr * | unshiftedPrev, | ||
| const struct env_pyr * | unshiftedCur, | ||
| const struct env_pyr * | shiftedPrev, | ||
| const struct env_pyr * | shiftedCur, | ||
| env_chan_status_func * | status_func, | ||
| void * | status_userdata, | ||
| struct env_image * | result | ||
| ) |
A motion sensitive channel with direction selectivity.
Definition at line 472 of file env_channel.c.
References env_params::cs_lev_min, env_pyr::depth, env_chan_process_pyr(), env_img_make_empty(), env_img_resize_dims(), env_max_pyr_depth(), env_pyr_init(), env_pyr_make_empty(), env_params::motion_thresh, env_math::nbits, and env_params::scale_bits.
Referenced by env_motion_channel_input_and_consume_pyr().
| void env_chan_flicker | ( | const char * | tagName, |
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const struct env_image * | prev, | ||
| const struct env_image * | cur, | ||
| env_chan_status_func * | status_func, | ||
| void * | status_userdata, | ||
| struct env_image * | result | ||
| ) |
A temporal flicker channel.
Definition at line 404 of file env_channel.c.
References env_params::cs_lev_min, env_pyr::depth, env_image::dims, env_chan_process_pyr(), env_img_init(), env_img_make_empty(), env_max_pyr_depth(), env_pyr_build_lowpass_5(), env_pyr_init(), env_pyr_make_empty(), env_params::flicker_thresh, and env_params::scale_bits.
Referenced by Saliency::process(), and Saliency::process().
| void env_chan_intensity | ( | const char * | tagName, |
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const struct env_dims | inputdims, | ||
| const struct env_pyr * | lowpass5, | ||
| const int | normalizeOutput, | ||
| env_chan_status_func * | status_func, | ||
| void * | status_userdata, | ||
| struct env_image * | result | ||
| ) |
An intensity channel.
Definition at line 208 of file env_channel.c.
References env_chan_process_pyr().
Referenced by env_chan_color(), env_chan_color_rgby(), Saliency::process(), and Saliency::process().
| void env_chan_msflicker | ( | const char * | tagName, |
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const struct env_dims | inputDims, | ||
| const struct env_pyr * | prev_lowpass5, | ||
| const struct env_pyr * | cur_lowpass5, | ||
| env_chan_status_func * | status_func, | ||
| void * | status_userdata, | ||
| struct env_image * | result | ||
| ) |
A true multi-scale temporal flicker channel.
Definition at line 442 of file env_channel.c.
References env_chan_process_pyr(), env_img_make_empty(), env_pyr_init(), env_pyr_make_empty(), env_params::flicker_thresh, and env_params::scale_bits.
Referenced by Saliency::process(), and Saliency::process().
| void env_chan_orientation | ( | const char * | tagName, |
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const struct env_image * | img, | ||
| env_chan_status_func * | status_func, | ||
| void * | status_userdata, | ||
| struct env_image * | result | ||
| ) |
A composite channel with a set of steerable-filter subchannels.
Definition at line 339 of file env_channel.c.
References env_params::cs_lev_min, env_image::dims, ENV_ASSERT, env_c_image_div_scalar(), env_c_image_div_scalar_accum(), env_chan_steerable(), env_img_initializer, env_img_make_empty(), env_img_resize_dims(), env_max_normalize_inplace(), env_max_pyr_depth(), env_pyr_build_hipass_9(), env_pyr_init(), env_pyr_make_empty(), ENV_TRIG_TABSIZ, INTMAXNORMMAX, INTMAXNORMMIN, env_params::maxnorm_type, env_params::num_orientations, and env_params::range_thresh.
| void env_chan_process_pyr | ( | const char * | tagName, |
| const struct env_dims | inputDims, | ||
| const struct env_pyr * | pyr, | ||
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const int | takeAbs, | ||
| const int | normalizeOutput, | ||
| struct env_image * | result | ||
| ) |
Definition at line 124 of file env_channel.c.
References env_params::cs_del_max, env_params::cs_del_min, env_params::cs_lev_max, env_params::cs_lev_min, env_image::dims, ENV_ASSERT, env_c_image_div_scalar_accum(), env_center_surround(), env_downsize_9_inplace(), env_img_init(), env_img_make_empty(), env_img_resize_dims(), env_img_swap(), ENV_MAX, env_max_cs_index(), env_max_normalize_inplace(), env_max_pyr_depth(), env_rescale(), env_dims::h, INTMAXNORMMAX, INTMAXNORMMIN, env_params::maxnorm_type, env_params::output_map_level, env_params::range_thresh, env_params::submapPostNormProc, env_params::submapPostProc, env_params::submapPreProc, env_params::user_data_postnorm, env_params::user_data_postproc, env_params::user_data_preproc, and env_dims::w.
Referenced by env_chan_direction(), env_chan_flicker(), env_chan_intensity(), env_chan_msflicker(), and env_chan_steerable().
| void env_chan_steerable | ( | const char * | tagName, |
| const struct env_params * | envp, | ||
| const struct env_math * | imath, | ||
| const struct env_dims | inputdims, | ||
| const struct env_pyr * | hipass9, | ||
| const env_size_t | thetaidx, | ||
| env_chan_status_func * | status_func, | ||
| void * | status_userdata, | ||
| struct env_image * | result | ||
| ) |
An orientation filtering channel.
Definition at line 313 of file env_channel.c.
References env_math::costab, env_chan_process_pyr(), env_pyr_build_steerable_from_hipass_9(), env_pyr_initializer, env_pyr_make_empty(), ENV_TRIG_NBITS, ENV_TRIG_TABSIZ, and env_math::sintab.
Referenced by env_chan_orientation().
 1.9.8
1.9.8
