|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
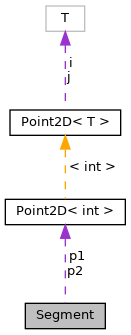
a segment is defined by the two end-points More...
#include <jevoisbase/Components/RoadFinder/RoadFinder.H>
Public Member Functions | |
| Segment (Point2D< int > in_p1, Point2D< int > in_p2, float in_angle, float in_length) | |
| bool | operator< (const Segment &s) |
Public Attributes | |
| Point2D< int > | p1 |
| Point2D< int > | p2 |
| float | angle |
| float | length |
a segment is defined by the two end-points
Definition at line 64 of file RoadFinder.H.
|
inline |
Definition at line 66 of file RoadFinder.H.
|
inline |
Definition at line 75 of file RoadFinder.H.
References length.
| float Segment::angle |
Definition at line 72 of file RoadFinder.H.
| float Segment::length |
Definition at line 73 of file RoadFinder.H.
Referenced by RoadFinder::computeVanishingLines(), RoadFinder::findLine2(), and operator<().
| Point2D<int> Segment::p1 |
Definition at line 70 of file RoadFinder.H.
Referenced by RoadFinder::computeVanishingLines(), and RoadFinder::findLine2().
| Point2D<int> Segment::p2 |
Definition at line 71 of file RoadFinder.H.
Referenced by RoadFinder::computeVanishingLines(), and RoadFinder::findLine2().
 1.9.8
1.9.8
