|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
Simple demo of the visual saliency algorithm of Itti et al., IEEE PAMI, 1998. More...
Public Member Functions | |
| DemoSaliency (std::string const &instance) | |
| Constructor. | |
| virtual | ~DemoSaliency () |
| Virtual destructor for safe inheritance. | |
| virtual void | process (jevois::InputFrame &&inframe, jevois::OutputFrame &&outframe) override |
| Processing function. | |
 Public Member Functions inherited from jevois::StdModule Public Member Functions inherited from jevois::StdModule | |
| StdModule (std::string const &instance) | |
| virtual | ~StdModule () |
| void | sendSerialImg1Dx (unsigned int camw, float x, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd1Dx (float x, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialImg1Dy (unsigned int camh, float y, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd1Dy (float y, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialImg2D (unsigned int camw, unsigned int camh, float x, float y, float w=0.0F, float h=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd2D (float x, float y, float w=0.0F, float h=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialContour2D (unsigned int camw, unsigned int camh, std::vector< cv::Point_< T > > points, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd3D (float x, float y, float z, float w=0.0F, float h=0.0F, float d=0.0F, float q1=0.0F, float q2=0.0F, float q3=0.0f, float q4=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd3D (std::vector< cv::Point3f > points, std::string const &id="", std::string const &extra="") |
| void | sendSerialObjReco (std::vector< ObjReco > const &res) |
| void | sendSerialObjDetImg2D (unsigned int camw, unsigned int camh, float x, float y, float w, float h, std::vector< ObjReco > const &res) |
| void | sendSerialObjDetImg2D (unsigned int camw, unsigned int camh, ObjDetect const &det) |
| void | sendSerialObjDetImg2D (unsigned int camw, unsigned int camh, ObjDetectOBB const &det) |
| JEVOIS_DEFINE_ENUM_CLASS (SerStyle,(Terse)(Normal)(Detail)(Fine)) | |
| JEVOIS_DECLARE_PARAMETER (serstyle, SerStyle, "Style for standardized serial messages as defined in " "http://jevois.org/doc/UserSerialStyle.html", SerStyle::Terse, SerStyle_Values, ParamCateg) | |
| JEVOIS_DECLARE_PARAMETER (serprec, unsigned int, "Number of decimal points in standardized serial messages as " "defined in http://jevois.org/doc/UserSerialStyle.html", 0U, jevois::Range< unsigned int >(0U, 10U), ParamCateg) | |
| JEVOIS_DEFINE_ENUM_CLASS (SerStamp,(None)(Frame)(Time)(FrameTime)(FrameDateTime)) | |
| JEVOIS_DECLARE_PARAMETER (serstamp, SerStamp, "Prepend standardized serial messages with a frame number, " "time, frame+time, or frame+date+time. See details in " "http://jevois.org/doc/UserSerialStyle.html", SerStamp::None, SerStamp_Values, ParamCateg) | |
| JEVOIS_DEFINE_ENUM_CLASS (SerMark,(None)(Start)(Stop)(Both)) | |
| JEVOIS_DECLARE_PARAMETER (sermark, SerMark, "Send serial message to mark the beginning (MARK START) of the " "processing of a video frame from the camera sensor, the end (MARK STOP), or both. " "Useful, among others, if one needs to know when no results were sent over serial " "on a given frame. Combine with parameter serstamp if you need to know the frame number.", SerMark::None, SerMark_Values, ParamCateg) | |
| Public Member Functions inherited from jevois::Module | |
| Module (std::string const &instance) | |
| virtual | ~Module () |
| virtual void | process (InputFrame &&inframe) |
| virtual void | process (InputFrame &&inframe, GUIhelper &helper) |
| virtual void | sendSerial (std::string const &str) |
| virtual void | parseSerial (std::string const &str, std::shared_ptr< UserInterface > s) |
| virtual void | supportedCommands (std::ostream &os) |
| Public Member Functions inherited from jevois::Component | |
| Component (std::string const &instance) | |
| virtual | ~Component () |
| std::shared_ptr< Comp > | addSubComponent (std::string const &instance, Args &&...args) |
| void | removeSubComponent (std::shared_ptr< Comp > &component) |
| void | removeSubComponent (std::string const &instance, bool warnIfNotFound=true) |
| std::shared_ptr< Comp > | getSubComponent (std::string const &instance) const |
| bool | isTopLevel () const |
| bool | initialized () const |
| std::string const & | className () const |
| std::string const & | instanceName () const |
| std::vector< std::string > | setParamVal (std::string const ¶mdescriptor, T const &val) |
| void | setParamValUnique (std::string const ¶mdescriptor, T const &val) |
| std::vector< std::pair< std::string, T > > | getParamVal (std::string const ¶mdescriptor) const |
| T | getParamValUnique (std::string const ¶mdescriptor) const |
| std::vector< std::string > | setParamString (std::string const ¶mdescriptor, std::string const &val) |
| void | setParamStringUnique (std::string const ¶mdescriptor, std::string const &val) |
| std::vector< std::pair< std::string, std::string > > | getParamString (std::string const ¶mdescriptor) const |
| std::string | getParamStringUnique (std::string const ¶mdescriptor) const |
| void | freezeParam (std::string const ¶mdescriptor, bool doit) |
| void | freezeAllParams (bool doit) |
| void | hideParam (std::string const ¶mdescriptor, bool doit) |
| void | hideAllParams (bool doit) |
| std::string | descriptor () const |
| void | setParamsFromFile (std::string const &filename) |
| std::istream & | setParamsFromStream (std::istream &is, std::string const &absfile) |
| virtual void | paramInfo (std::shared_ptr< UserInterface > s, std::map< std::string, std::string > &categs, bool skipFrozen, std::string const &cname="", std::string const &pfx="") |
| void | foreachParam (std::function< void(std::string const &compname, ParameterBase *p)> func, std::string const &cname="") |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ParameterCategory const &category) |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ValidValuesSpec< T > const &validValuesSpec, ParameterCategory const &category) |
| void | setDynamicParameterCallback (std::string const &name, std::function< void(T const &)> cb, bool callnow=true) |
| void | removeDynamicParameter (std::string const &name, bool throw_if_not_found=true) |
| void | setPath (std::string const &path) |
| std::filesystem::path | absolutePath (std::filesystem::path const &path="") |
| std::shared_ptr< Comp > | addSubComponent (std::string const &instance, Args &&...args) |
| void | removeSubComponent (std::shared_ptr< Comp > &component) |
| void | removeSubComponent (std::string const &instance, bool warnIfNotFound=true) |
| std::shared_ptr< Comp > | getSubComponent (std::string const &instance) const |
| bool | isTopLevel () const |
| bool | initialized () const |
| std::string const & | className () const |
| std::string const & | instanceName () const |
| std::vector< std::string > | setParamVal (std::string const ¶mdescriptor, T const &val) |
| void | setParamValUnique (std::string const ¶mdescriptor, T const &val) |
| std::vector< std::pair< std::string, T > > | getParamVal (std::string const ¶mdescriptor) const |
| T | getParamValUnique (std::string const ¶mdescriptor) const |
| std::vector< std::string > | setParamString (std::string const ¶mdescriptor, std::string const &val) |
| void | setParamStringUnique (std::string const ¶mdescriptor, std::string const &val) |
| std::vector< std::pair< std::string, std::string > > | getParamString (std::string const ¶mdescriptor) const |
| std::string | getParamStringUnique (std::string const ¶mdescriptor) const |
| void | freezeParam (std::string const ¶mdescriptor, bool doit) |
| void | freezeAllParams (bool doit) |
| void | hideParam (std::string const ¶mdescriptor, bool doit) |
| void | hideAllParams (bool doit) |
| std::string | descriptor () const |
| void | setParamsFromFile (std::string const &filename) |
| std::istream & | setParamsFromStream (std::istream &is, std::string const &absfile) |
| virtual void | paramInfo (std::shared_ptr< UserInterface > s, std::map< std::string, std::string > &categs, bool skipFrozen, std::string const &cname="", std::string const &pfx="") |
| void | foreachParam (std::function< void(std::string const &compname, ParameterBase *p)> func, std::string const &cname="") |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ParameterCategory const &category) |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ValidValuesSpec< T > const &validValuesSpec, ParameterCategory const &category) |
| void | setDynamicParameterCallback (std::string const &name, std::function< void(T const &)> cb, bool callnow=true) |
| void | removeDynamicParameter (std::string const &name, bool throw_if_not_found=true) |
| void | setPath (std::string const &path) |
| std::filesystem::path | absolutePath (std::filesystem::path const &path="") |
| Public Member Functions inherited from jevois::ParameterRegistry | |
| virtual | ~ParameterRegistry () |
Protected Attributes | |
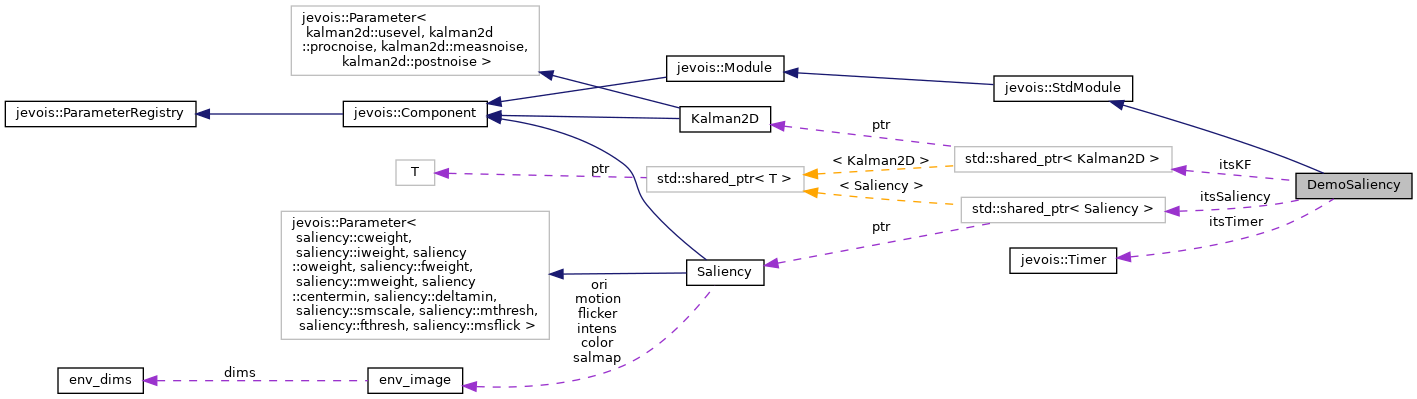
| std::shared_ptr< Saliency > | itsSaliency |
| std::shared_ptr< Kalman2D > | itsKF |
| jevois::Timer | itsTimer |
Additional Inherited Members | |
| Protected Member Functions inherited from jevois::StdModule | |
| void | sendSerialMarkStart () |
| void | sendSerialMarkStop () |
| std::string | getStamp () const |
| Protected Member Functions inherited from jevois::Component | |
| virtual void | preInit () |
| virtual void | postInit () |
| virtual void | preUninit () |
| virtual void | postUninit () |
| virtual void | preInit () |
| virtual void | postInit () |
| virtual void | preUninit () |
| virtual void | postUninit () |
| Protected Member Functions inherited from jevois::ParameterRegistry | |
| void | addParameter (ParameterBase *const param) |
| void | removeParameter (ParameterBase *const param) |
| void | callbackInitCall () |
Simple demo of the visual saliency algorithm of Itti et al., IEEE PAMI, 1998.
Visual saliency algorithm as described at http://ilab.usc.edu/bu/
This algorithm finds the location in the camera's view that is the most attention-grabbing, conspicuous, or so-called salient. This location is marked on every video frame by the pink square. Salient locations detected on each frame are smoothed over time using a Kalman filter. The smoothed attention trajectory is shown with a green circle.
For an introduction to visual saliency computation, see http://ilab.usc.edu/bu/
This module can send standardized serial messages as described in Standardized serial messages formatting, where all coordinates and sizes are standardized using Helper functions to convert coordinates from camera resolution to standardized. One message is issued on every video frame at the temporally smoothed attended (most salient) location (green circle in the video display):
id: always sm (shorthand for saliency map)x, y: standardized 2D coordinates of temporally-filtered most salient pointw, h: standardized size of the pink square box around each attended pointextra: none (empty string)See Standardized serial messages formatting for more on standardized serial messages, and Helper functions to convert coordinates from camera resolution to standardized for more info on standardized coordinates.
Definition at line 82 of file DemoSaliency.C.
|
inline |
|
inlinevirtual |
Virtual destructor for safe inheritance.
Definition at line 93 of file DemoSaliency.C.
|
inlineoverridevirtual |
Processing function.
Reimplemented from jevois::Module.
Definition at line 96 of file DemoSaliency.C.
References jevois::async(), jevois::rawimage::drawCircle(), jevois::rawimage::drawFilledRect(), drawGist(), drawMap(), jevois::rawimage::drawRect(), h, jevois::RawImage::height, itsKF, itsSaliency, itsTimer, jevois::yuyv::LightGreen, jevois::rawimage::paste(), jevois::RawImage::require(), jevois::StdModule::sendSerialImg2D(), jevois::Timer::start(), jevois::Timer::stop(), jevois::yuyv::White, jevois::RawImage::width, and jevois::rawimage::writeText().
|
protected |
Definition at line 221 of file DemoSaliency.C.
Referenced by DemoSaliency(), and process().
|
protected |
Definition at line 220 of file DemoSaliency.C.
Referenced by DemoSaliency(), and process().
|
protected |
Definition at line 222 of file DemoSaliency.C.
Referenced by process().
 1.9.8
1.9.8
