|
JeVois
1.23
JeVois Smart Embedded Machine Vision Toolkit
|
|
|
JeVois
1.23
JeVois Smart Embedded Machine Vision Toolkit
|
|
#include <jevois/Core/Module.H>
Virtual base class for a vision processing module.
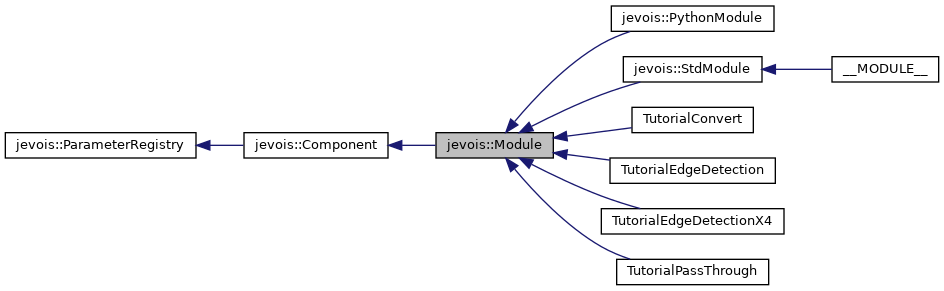
Module is the base class to implement camera-to-USB frame-by-frame video processing. The Engine instantiates one class derived from Module, according to the current VideoMapping selected by the end user (e.g., current image resolution, format, and frame rate setected by a webcam viewing program on a host computer). The Module is loaded as shared object (.so) file according to the VideoMapping definitions in videomappings.cfg and the current VideoMapping selected by the user.
Module derives from Component and as such can contain:
This allows one to implement complex vision processing pipelines efficiently and with substantial code re-use. For example, one may first want to implement an EdgeDetector or Saliency component, with Parameter settings for various thresholds, features, etc. One can then create any number of top-level objects that derive from Module and that may contain one or more EdgeDetector, Saliency, etc components in their hierarchy of sub-components, with the implementation in the module simply routing images from one Component to another to create a processing pipeline.
Classes that derive from Module should implement up to four functions:
Public Member Functions | |
| Module (std::string const &instance) | |
| Constructor. | |
| virtual | ~Module () |
| Virtual destructor for safe inheritance. | |
| virtual void | process (InputFrame &&inframe, OutputFrame &&outframe) |
| Processing function, version that receives a frame from camera and sends a frame out over USB. | |
| virtual void | process (InputFrame &&inframe) |
| Processing function, version that receives a frame from camera and does not use USB. | |
| virtual void | process (InputFrame &&inframe, GUIhelper &helper) |
| Processing function, version that receives a frame from camera, no USB, but GUI output on JeVois-Pro. | |
| virtual void | sendSerial (std::string const &str) |
| Send a string over the 'serout' serial port. | |
| virtual void | parseSerial (std::string const &str, std::shared_ptr< UserInterface > s) |
| Receive a string from a serial port which contains a user command. | |
| virtual void | supportedCommands (std::ostream &os) |
| Human-readable description of this Module's supported custom commands. | |
 Public Member Functions inherited from jevois::Component Public Member Functions inherited from jevois::Component | |
| Component (std::string const &instance) | |
| Constructor. | |
| virtual | ~Component () |
| Virtual destructor for safe inheritance. | |
| template<class Comp , typename... Args> | |
| std::shared_ptr< Comp > | addSubComponent (std::string const &instance, Args &&...args) |
| Pseudo-constructor: construct and add another component as a subcomponent of this one. | |
| template<class Comp > | |
| void | removeSubComponent (std::shared_ptr< Comp > &component) |
| Remove a sub-Component from this Component, by shared_ptr. | |
| void | removeSubComponent (std::string const &instance, bool warnIfNotFound=true) |
| Remove a sub-Component from this Component, by instance name. | |
| template<class Comp = jevois::Component> | |
| std::shared_ptr< Comp > | getSubComponent (std::string const &instance) const |
| Get a sub-component by instance name. | |
| bool | isTopLevel () const |
| Returns true if this component is top-level, i.e., its parent is jevois::Manager. | |
| bool | initialized () const |
| Has this component been initialized yet? | |
| std::string const & | className () const |
| The class name of this component. | |
| std::string const & | instanceName () const |
| The instance name of this component. | |
| template<typename T > | |
| std::vector< std::string > | setParamVal (std::string const ¶mdescriptor, T const &val) |
| Set a parameter value. | |
| template<typename T > | |
| void | setParamValUnique (std::string const ¶mdescriptor, T const &val) |
| Set a parameter value, simple version assuming only one parameter match. | |
| template<typename T > | |
| std::vector< std::pair< std::string, T > > | getParamVal (std::string const ¶mdescriptor) const |
| Get parameter(s) value(s) by descriptor. | |
| template<typename T > | |
| T | getParamValUnique (std::string const ¶mdescriptor) const |
| Get a parameter value, simple version assuming only one parameter match. | |
| std::vector< std::string > | setParamString (std::string const ¶mdescriptor, std::string const &val) |
| Set a parameter value, by string. | |
| void | setParamStringUnique (std::string const ¶mdescriptor, std::string const &val) |
| Set a parameter value by string, simple version assuming only one parameter match. | |
| std::vector< std::pair< std::string, std::string > > | getParamString (std::string const ¶mdescriptor) const |
| Get a parameter value, by string. | |
| std::string | getParamStringUnique (std::string const ¶mdescriptor) const |
| Get a parameter value by string, simple version assuming only one parameter match. | |
| void | freezeParam (std::string const ¶mdescriptor, bool doit) |
| Freeze/unfreeze a parameter, by name, see ParameterBase::freeze() | |
| void | freezeAllParams (bool doit) |
| Freeze all parameters. | |
| void | hideParam (std::string const ¶mdescriptor, bool doit) |
| Hide/unhide a parameter, by name, see ParameterBase::hide() | |
| void | hideAllParams (bool doit) |
| Hide all parameters. | |
| std::string | descriptor () const |
| Get our full descriptor (including all parents) as [Instancename]:[...]:[...]. | |
| void | setParamsFromFile (std::string const &filename) |
| Set some parameters from a file. | |
| std::istream & | setParamsFromStream (std::istream &is, std::string const &absfile) |
| Set some parameters from an open stream. | |
| virtual void | paramInfo (std::shared_ptr< UserInterface > s, std::map< std::string, std::string > &categs, bool skipFrozen, std::string const &cname="", std::string const &pfx="") |
| Get machine-oriented descriptions of all parameters. | |
| void | foreachParam (std::function< void(std::string const &compname, ParameterBase *p)> func, std::string const &cname="") |
| Run a function on every param we hold. | |
| template<typename T > | |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ParameterCategory const &category) |
| Add a new parameter after the Component has already been constructed. | |
| template<typename T , template< typename > class ValidValuesSpec> | |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ValidValuesSpec< T > const &validValuesSpec, ParameterCategory const &category) |
| Add a new parameter after the Component has already been constructed. | |
| template<typename T > | |
| void | setDynamicParameterCallback (std::string const &name, std::function< void(T const &)> cb, bool callnow=true) |
| Register a callback with a previously created dynamic parameter. | |
| void | removeDynamicParameter (std::string const &name, bool throw_if_not_found=true) |
| Remove a previously added dynamic parameter. | |
| void | setPath (std::string const &path) |
| Assign a filesystem path to this component. | |
| std::filesystem::path | absolutePath (std::filesystem::path const &path="") |
| If given path is relative (not starting with /), prepend the Component path to it. | |
| Public Member Functions inherited from jevois::ParameterRegistry | |
| virtual | ~ParameterRegistry () |
| Virtual destructor for safe inheritance. | |
Additional Inherited Members | |
| Protected Member Functions inherited from jevois::Component | |
| virtual void | preInit () |
| Called before all sub-Components are init()ed. | |
| virtual void | postInit () |
| Called after all sub-Components are init()ed. | |
| virtual void | preUninit () |
| Called before all sub-Components are uninit()ed. | |
| virtual void | postUninit () |
| Called after all sub-Components are uninit()ed. | |
| Protected Member Functions inherited from jevois::ParameterRegistry | |
| void | addParameter (ParameterBase *const param) |
| The Parameter class uses this method to register itself on construction with its owning Component. | |
| void | removeParameter (ParameterBase *const param) |
| The Parameter class uses this method to un-register itself on destruction with its owning Component. | |
| void | callbackInitCall () |
| For all parameters that have a callback which has never been called, call it with the default param value. | |
| jevois::Module::Module | ( | std::string const & | instance | ) |
|
virtual |
|
virtual |
Receive a string from a serial port which contains a user command.
This function may be called in between calls to process() with any received string from any of the serial ports. Some commands are parsed upstream already (like "help", set param value, set camera control, etc; see the Engine class) and will not be received here. Only the ones not recognized by the Engine will be received (i.e., custom commands specific to your module).
The default implementation just throws std::runtime_error("Unsupported command"), but some modules may want to override this function to handle custom commands. If you successfully process the command, just return; otherwise, throw, and if your exception derives from std::exception, the Engine will append its what() to the error message issued to the user. When you support commands here, you should update the implementation of supportedCommands() to provide some description of those commands to the users.
The s parameter is the serial port that received the command. You can send any results back to that port using writeString() on it. Note that the Engine will automatically add the 'OK' message upon success, so you do not have to send that here.
Reimplemented in jevois::PythonModule.
Definition at line 63 of file Module.C.
Referenced by jevois::PythonModule::parseSerial().
|
virtual |
Processing function, version that receives a frame from camera and does not use USB.
This function is called once for each grabbed video frame from the camera, and it should complete within the camera's frame period in order to avoid dropping frames. The InputFrame object is a simple wrapper to ensure that the low-level video buffers will always be returned to the low-level camera driver even if the process function throws at any point during the processing. If any error occurs, it is hence ok to throw from within process() at any time, just make sure your locally allocated resources will be freed, which is usually best achieved by using shared_ptr and similar wrappers around them. The Engine (which calls process() on your module for every frame) will catch any exception an proceed to the next frame.
Default implementation in the base class just throws. Derived classes should override it.
Reimplemented in jevois::PythonModule.
Definition at line 44 of file Module.C.
References LFATAL.
|
virtual |
Processing function, version that receives a frame from camera, no USB, but GUI output on JeVois-Pro.
This function is called once for each grabbed video frame from the camera, and it should complete within the camera's frame period in order to avoid dropping frames. The InputFrame object is a simple wrapper to ensure that the low-level video buffers will always be returned to the low-level camera driver even if the process function throws at any point during the processing. If any error occurs, it is hence ok to throw from within process() at any time, just make sure your locally allocated resources will be freed, which is usually best achieved by using shared_ptr and similar wrappers around them. The Engine (which calls process() on your module for every frame) will catch any exception an proceed to the next frame.
Default implementation in the base class just throws. Derived classes should override it.
Reimplemented in jevois::PythonModule.
Definition at line 49 of file Module.C.
References LFATAL.
|
virtual |
Processing function, version that receives a frame from camera and sends a frame out over USB.
This function is called once for each grabbed video frame from the camera, and it should complete within the camera's frame period in order to avoid dropping frames. The InputFrame and OutputFrame objects are simple wrappers to ensure that the low-level video buffers will always be returned to the low-level camera and USB drivers even if the process function throws at any point during the processing. If any error occurs, it is hence ok to throw from within process() at any time, just make sure your locally allocated resources will be freed, which is usually best achieved by using shared_ptr and similar wrappers around them. The Engine (which calls process() on your module for every frame) will catch any exception an proceed to the next frame.
Default implementation in the base class just throws. Derived classes should override it.
Reimplemented in jevois::PythonModule.
Definition at line 40 of file Module.C.
References LFATAL.
|
virtual |
Send a string over the 'serout' serial port.
The default implementation just sends the string to the serial port specified by the 'serout' Parameter in Engine (which could be the hardware serial port, the serial-over-USB port, both, or none; see Command-line interface user guide for information about serout). No need to override in most cases. Typically, you would use this function from within process() to send out some results of your processing.
Note that the default 'serout' Parameter setting in Engine is None. This is to allow users to configure parameters, get parameter values, possibly read the help message, etc before the flow of serial outputs from vision processing starts. Once ready to receive serial outputs, one would typically issue a command 'setpar serout Hard' over the JeVois command line to enable serial outputs to the hardware serial port. An Arduino would issue that setpar commands when it is ready to work. See ArduinoTutorial for an example.
Definition at line 54 of file Module.C.
References LFATAL, and jevois::Engine::sendSerial().
|
virtual |
Human-readable description of this Module's supported custom commands.
The format here is free. Just use std::endl to demarcate lines, these will be converted to the appropriate line endings by the serial ports. Default implementation writes "None" to os.
Reimplemented in jevois::PythonModule.
Definition at line 67 of file Module.C.
Referenced by jevois::PythonModule::supportedCommands().
 1.9.8
1.9.8
