|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
Road finder demo. More...
Public Member Functions | |
| RoadNavigation (std::string const &instance) | |
| Constructor. | |
| virtual | ~RoadNavigation () |
| Virtual destructor for safe inheritance. | |
| virtual void | process (jevois::InputFrame &&inframe) override |
| Processing function, no video out. | |
| virtual void | process (jevois::InputFrame &&inframe, jevois::OutputFrame &&outframe) override |
| Processing function with USB video out. | |
 Public Member Functions inherited from jevois::StdModule Public Member Functions inherited from jevois::StdModule | |
| StdModule (std::string const &instance) | |
| virtual | ~StdModule () |
| void | sendSerialImg1Dx (unsigned int camw, float x, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd1Dx (float x, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialImg1Dy (unsigned int camh, float y, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd1Dy (float y, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialImg2D (unsigned int camw, unsigned int camh, float x, float y, float w=0.0F, float h=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd2D (float x, float y, float w=0.0F, float h=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialContour2D (unsigned int camw, unsigned int camh, std::vector< cv::Point_< T > > points, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd3D (float x, float y, float z, float w=0.0F, float h=0.0F, float d=0.0F, float q1=0.0F, float q2=0.0F, float q3=0.0f, float q4=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd3D (std::vector< cv::Point3f > points, std::string const &id="", std::string const &extra="") |
| void | sendSerialObjReco (std::vector< ObjReco > const &res) |
| void | sendSerialObjDetImg2D (unsigned int camw, unsigned int camh, float x, float y, float w, float h, std::vector< ObjReco > const &res) |
| void | sendSerialObjDetImg2D (unsigned int camw, unsigned int camh, ObjDetect const &det) |
| void | sendSerialObjDetImg2D (unsigned int camw, unsigned int camh, ObjDetectOBB const &det) |
| JEVOIS_DEFINE_ENUM_CLASS (SerStyle,(Terse)(Normal)(Detail)(Fine)) | |
| JEVOIS_DECLARE_PARAMETER (serstyle, SerStyle, "Style for standardized serial messages as defined in " "http://jevois.org/doc/UserSerialStyle.html", SerStyle::Terse, SerStyle_Values, ParamCateg) | |
| JEVOIS_DECLARE_PARAMETER (serprec, unsigned int, "Number of decimal points in standardized serial messages as " "defined in http://jevois.org/doc/UserSerialStyle.html", 0U, jevois::Range< unsigned int >(0U, 10U), ParamCateg) | |
| JEVOIS_DEFINE_ENUM_CLASS (SerStamp,(None)(Frame)(Time)(FrameTime)(FrameDateTime)) | |
| JEVOIS_DECLARE_PARAMETER (serstamp, SerStamp, "Prepend standardized serial messages with a frame number, " "time, frame+time, or frame+date+time. See details in " "http://jevois.org/doc/UserSerialStyle.html", SerStamp::None, SerStamp_Values, ParamCateg) | |
| JEVOIS_DEFINE_ENUM_CLASS (SerMark,(None)(Start)(Stop)(Both)) | |
| JEVOIS_DECLARE_PARAMETER (sermark, SerMark, "Send serial message to mark the beginning (MARK START) of the " "processing of a video frame from the camera sensor, the end (MARK STOP), or both. " "Useful, among others, if one needs to know when no results were sent over serial " "on a given frame. Combine with parameter serstamp if you need to know the frame number.", SerMark::None, SerMark_Values, ParamCateg) | |
| Public Member Functions inherited from jevois::Module | |
| Module (std::string const &instance) | |
| virtual | ~Module () |
| virtual void | process (InputFrame &&inframe, GUIhelper &helper) |
| virtual void | sendSerial (std::string const &str) |
| virtual void | parseSerial (std::string const &str, std::shared_ptr< UserInterface > s) |
| virtual void | supportedCommands (std::ostream &os) |
| Public Member Functions inherited from jevois::Component | |
| Component (std::string const &instance) | |
| virtual | ~Component () |
| std::shared_ptr< Comp > | addSubComponent (std::string const &instance, Args &&...args) |
| void | removeSubComponent (std::shared_ptr< Comp > &component) |
| void | removeSubComponent (std::string const &instance, bool warnIfNotFound=true) |
| std::shared_ptr< Comp > | getSubComponent (std::string const &instance) const |
| bool | isTopLevel () const |
| bool | initialized () const |
| std::string const & | className () const |
| std::string const & | instanceName () const |
| std::vector< std::string > | setParamVal (std::string const ¶mdescriptor, T const &val) |
| void | setParamValUnique (std::string const ¶mdescriptor, T const &val) |
| std::vector< std::pair< std::string, T > > | getParamVal (std::string const ¶mdescriptor) const |
| T | getParamValUnique (std::string const ¶mdescriptor) const |
| std::vector< std::string > | setParamString (std::string const ¶mdescriptor, std::string const &val) |
| void | setParamStringUnique (std::string const ¶mdescriptor, std::string const &val) |
| std::vector< std::pair< std::string, std::string > > | getParamString (std::string const ¶mdescriptor) const |
| std::string | getParamStringUnique (std::string const ¶mdescriptor) const |
| void | freezeParam (std::string const ¶mdescriptor, bool doit) |
| void | freezeAllParams (bool doit) |
| void | hideParam (std::string const ¶mdescriptor, bool doit) |
| void | hideAllParams (bool doit) |
| std::string | descriptor () const |
| void | setParamsFromFile (std::string const &filename) |
| std::istream & | setParamsFromStream (std::istream &is, std::string const &absfile) |
| virtual void | paramInfo (std::shared_ptr< UserInterface > s, std::map< std::string, std::string > &categs, bool skipFrozen, std::string const &cname="", std::string const &pfx="") |
| void | foreachParam (std::function< void(std::string const &compname, ParameterBase *p)> func, std::string const &cname="") |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ParameterCategory const &category) |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ValidValuesSpec< T > const &validValuesSpec, ParameterCategory const &category) |
| void | setDynamicParameterCallback (std::string const &name, std::function< void(T const &)> cb, bool callnow=true) |
| void | removeDynamicParameter (std::string const &name, bool throw_if_not_found=true) |
| void | setPath (std::string const &path) |
| std::filesystem::path | absolutePath (std::filesystem::path const &path="") |
| std::shared_ptr< Comp > | addSubComponent (std::string const &instance, Args &&...args) |
| void | removeSubComponent (std::shared_ptr< Comp > &component) |
| void | removeSubComponent (std::string const &instance, bool warnIfNotFound=true) |
| std::shared_ptr< Comp > | getSubComponent (std::string const &instance) const |
| bool | isTopLevel () const |
| bool | initialized () const |
| std::string const & | className () const |
| std::string const & | instanceName () const |
| std::vector< std::string > | setParamVal (std::string const ¶mdescriptor, T const &val) |
| void | setParamValUnique (std::string const ¶mdescriptor, T const &val) |
| std::vector< std::pair< std::string, T > > | getParamVal (std::string const ¶mdescriptor) const |
| T | getParamValUnique (std::string const ¶mdescriptor) const |
| std::vector< std::string > | setParamString (std::string const ¶mdescriptor, std::string const &val) |
| void | setParamStringUnique (std::string const ¶mdescriptor, std::string const &val) |
| std::vector< std::pair< std::string, std::string > > | getParamString (std::string const ¶mdescriptor) const |
| std::string | getParamStringUnique (std::string const ¶mdescriptor) const |
| void | freezeParam (std::string const ¶mdescriptor, bool doit) |
| void | freezeAllParams (bool doit) |
| void | hideParam (std::string const ¶mdescriptor, bool doit) |
| void | hideAllParams (bool doit) |
| std::string | descriptor () const |
| void | setParamsFromFile (std::string const &filename) |
| std::istream & | setParamsFromStream (std::istream &is, std::string const &absfile) |
| virtual void | paramInfo (std::shared_ptr< UserInterface > s, std::map< std::string, std::string > &categs, bool skipFrozen, std::string const &cname="", std::string const &pfx="") |
| void | foreachParam (std::function< void(std::string const &compname, ParameterBase *p)> func, std::string const &cname="") |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ParameterCategory const &category) |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ValidValuesSpec< T > const &validValuesSpec, ParameterCategory const &category) |
| void | setDynamicParameterCallback (std::string const &name, std::function< void(T const &)> cb, bool callnow=true) |
| void | removeDynamicParameter (std::string const &name, bool throw_if_not_found=true) |
| void | setPath (std::string const &path) |
| std::filesystem::path | absolutePath (std::filesystem::path const &path="") |
| Public Member Functions inherited from jevois::ParameterRegistry | |
| virtual | ~ParameterRegistry () |
Protected Attributes | |
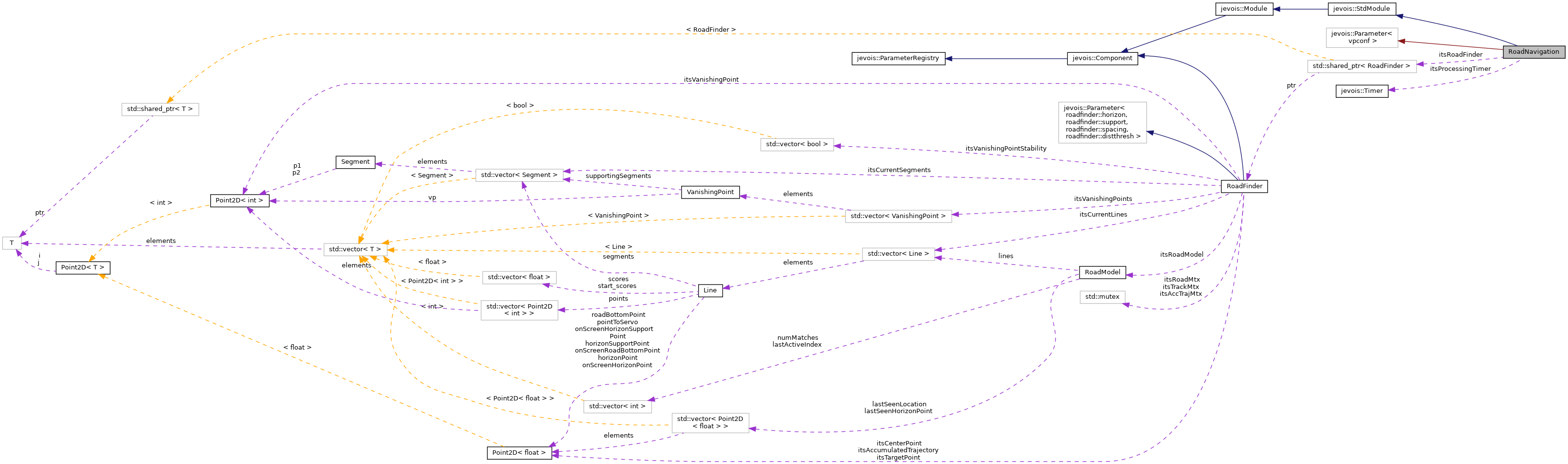
| jevois::Timer | itsProcessingTimer |
| Module internals. | |
| std::shared_ptr< RoadFinder > | itsRoadFinder |
Related Symbols | |
(Note that these are not member symbols.) | |
| JEVOIS_DECLARE_PARAMETER (vpconf, float, "Minimum vanishing point confidence required to send a serial message. " "Note that currently, confidence values are binary (only 0 or 1), and quite conservative " "(many good detections may get a confidence of 0 if they are not very clean).", 0.0F, roadfinder::ParamCateg) | |
| Parameter. | |
Additional Inherited Members | |
| Protected Member Functions inherited from jevois::StdModule | |
| void | sendSerialMarkStart () |
| void | sendSerialMarkStop () |
| std::string | getStamp () const |
| Protected Member Functions inherited from jevois::Component | |
| virtual void | preInit () |
| virtual void | postInit () |
| virtual void | preUninit () |
| virtual void | postUninit () |
| virtual void | preInit () |
| virtual void | postInit () |
| virtual void | preUninit () |
| virtual void | postUninit () |
| Protected Member Functions inherited from jevois::ParameterRegistry | |
| void | addParameter (ParameterBase *const param) |
| void | removeParameter (ParameterBase *const param) |
| void | callbackInitCall () |
Road finder demo.
This algorithm detects road using a compination of edge detection and tracking, and texture analysis. The algorithm is an implementation of Chang, Siagian and Itti, IROS 2012, available at http://ilab.usc.edu/publications/doc/Chang_etal12iros.pdf
The algorithms combines detection and tracking of line segments at the edges of the road or on the road (e.g., lane dividers), and texture analysis to distinguish the road region from its surroundings. One strength of this algorithm is that it requires no training. No need to drive your robot on many roads to learn about the appearance of roads. The flipside of this, of course, is that driving on roads which do not look like standard roads or trails may fail.
The algorithm outputs the horizontal coordinate of the vanishing point of the road, which usually is a good indication of the road heading (except in very tight bends or corners).
Detected line segments are shown in black and white, while segments that have been reliably tracked over multiple frames are shown in thick purple. Estimated vanishing point location and confidence is shown as a big green disk on the horizon line.
Note that the demo display runs much slower than the algorithm with no video output (which should be used on autonomous cars), simply because drawing all the detected line segments takes a lot of time.
This module can send standardized serial messages as described in Standardized serial messages formatting. One 1D message is issued on every video frame for the vanishing point's horizontal location.
id: always vp (shorthand for vanishing point)x: standardized 2D horizontal coordinate of the vanishing pointw: always 0.extra: none (empty string)See Standardized serial messages formatting for more on standardized serial messages, and Helper functions to convert coordinates from camera resolution to standardized for more info on standardized coordinates.
To casually try out this module, just search the web for pictures of roads and point the JeVois camera to one of them. Make sure that you align the horizon line of the algorithm (which has a number of purple and green disks) roughly with the horizon line in your picture. As you move the camera left and right, the location of the large green disk that marks the detected vanishing point should move left and right, and should point to the vanishing point of the road in your image.
When using on a mobile robot in the real world, setting the proper horizon line is essential for good operation of the algorithm. This is determined by parameter horizon, which should be tuned according to the height and tilt angle of the JeVois camera on your vehicle.
Definition at line 108 of file RoadNavigation.C.
|
inline |
|
inlinevirtual |
Virtual destructor for safe inheritance.
Definition at line 123 of file RoadNavigation.C.
|
inlineoverridevirtual |
Processing function, no video out.
Reimplemented from jevois::Module.
Definition at line 128 of file RoadNavigation.C.
References itsRoadFinder, and jevois::StdModule::sendSerialImg1Dx().
|
inlineoverridevirtual |
Processing function with USB video out.
Reimplemented from jevois::Module.
Definition at line 146 of file RoadNavigation.C.
References jevois::yuyv::Black, jevois::rawimage::convertToCvGray(), jevois::rawimage::drawFilledRect(), h, jevois::RawImage::height, itsProcessingTimer, itsRoadFinder, jevois::rawimage::paste(), jevois::RawImage::require(), jevois::StdModule::sendSerialImg1Dx(), jevois::Timer::start(), jevois::Timer::stop(), jevois::yuyv::White, jevois::RawImage::width, and jevois::rawimage::writeText().
|
related |
Parameter.
|
protected |
|
protected |
Definition at line 205 of file RoadNavigation.C.
Referenced by process(), process(), and RoadNavigation().
 1.9.8
1.9.8
