|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
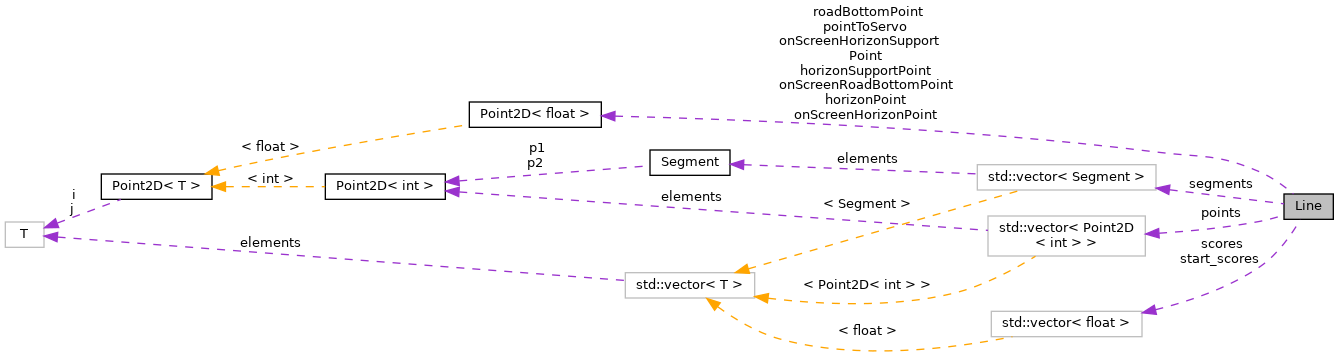
keeps all the ready to use information of a supporting line as it pertains to describing the road More...
#include <jevoisbase/Components/RoadFinder/RoadFinder.H>
Public Member Functions | |
| Line () | |
Public Attributes | |
| float | length |
| basic information to specify the line | |
| float | angle |
| float | score |
| std::vector< Point2D< int > > | points |
| the points that are fit to the line | |
| Point2D< float > | horizonPoint |
| quick information for various locations with respect to the road | |
| Point2D< float > | horizonSupportPoint |
| Point2D< float > | roadBottomPoint |
| Point2D< float > | onScreenRoadBottomPoint |
| Point2D< float > | onScreenHorizonPoint |
| Point2D< float > | onScreenHorizonSupportPoint |
| std::vector< Segment > | segments |
| original supporting segments out of sync after initial frame | |
| std::vector< float > | scores |
| tracking information to monitor health of the line | |
| std::vector< float > | start_scores |
| bool | isActive |
| tracks whether the line can be used for finding the road center | |
| float | angleToCenter |
| Point2D< float > | pointToServo |
| float | offset |
| int | index |
keeps all the ready to use information of a supporting line as it pertains to describing the road
Definition at line 95 of file RoadFinder.H.
|
inline |
Definition at line 97 of file RoadFinder.H.
| float Line::angle |
Definition at line 102 of file RoadFinder.H.
Referenced by RoadFinder::updateLine().
| float Line::angleToCenter |
Definition at line 125 of file RoadFinder.H.
Referenced by RoadFinder::combine().
| Point2D<float> Line::horizonPoint |
quick information for various locations with respect to the road
Definition at line 109 of file RoadFinder.H.
Referenced by RoadFinder::updateLine().
| Point2D<float> Line::horizonSupportPoint |
Definition at line 110 of file RoadFinder.H.
Referenced by RoadFinder::updateLine().
| int Line::index |
Definition at line 129 of file RoadFinder.H.
Referenced by RoadFinder::combine().
| bool Line::isActive |
tracks whether the line can be used for finding the road center
Definition at line 124 of file RoadFinder.H.
Referenced by RoadFinder::combine().
| float Line::length |
basic information to specify the line
Definition at line 101 of file RoadFinder.H.
Referenced by RoadFinder::findLine2().
| float Line::offset |
Definition at line 127 of file RoadFinder.H.
Referenced by RoadFinder::combine().
| Point2D<float> Line::onScreenHorizonPoint |
Definition at line 113 of file RoadFinder.H.
Referenced by RoadFinder::updateLine().
| Point2D<float> Line::onScreenHorizonSupportPoint |
Definition at line 114 of file RoadFinder.H.
Referenced by RoadFinder::computeVanishingLines(), RoadFinder::discardDuplicates(), RoadFinder::findLine2(), and RoadFinder::updateLine().
| Point2D<float> Line::onScreenRoadBottomPoint |
Definition at line 112 of file RoadFinder.H.
Referenced by RoadFinder::computeVanishingLines(), RoadFinder::discardDuplicates(), RoadFinder::findLine2(), and RoadFinder::updateLine().
| std::vector<Point2D<int> > Line::points |
the points that are fit to the line
Definition at line 106 of file RoadFinder.H.
Referenced by RoadFinder::updateLine().
| Point2D<float> Line::pointToServo |
Definition at line 126 of file RoadFinder.H.
Referenced by RoadFinder::combine().
| Point2D<float> Line::roadBottomPoint |
Definition at line 111 of file RoadFinder.H.
Referenced by RoadFinder::updateLine().
| float Line::score |
Definition at line 103 of file RoadFinder.H.
Referenced by RoadFinder::computeVanishingLines(), RoadFinder::discardDuplicates(), RoadFinder::findLine2(), and RoadFinder::updateLine().
| std::vector<float> Line::scores |
tracking information to monitor health of the line
Definition at line 120 of file RoadFinder.H.
Referenced by RoadFinder::combine().
| std::vector<Segment> Line::segments |
original supporting segments out of sync after initial frame
Definition at line 117 of file RoadFinder.H.
Referenced by RoadFinder::findLine2(), PyPostYOLOv8seg.PyPostYOLOv8seg::process(), and PyPostYOLOv8seg.PyPostYOLOv8seg::report().
| std::vector<float> Line::start_scores |
Definition at line 121 of file RoadFinder.H.
Referenced by RoadFinder::combine(), and RoadFinder::computeVanishingLines().
 1.9.8
1.9.8
