|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
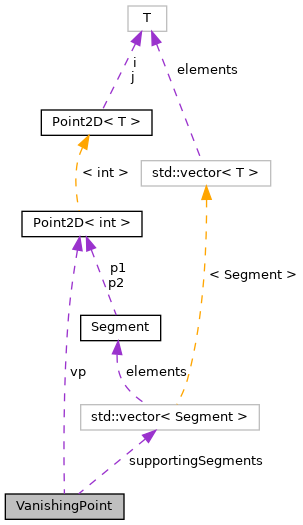
Keeps all the supporting information about a specific vanishing point. More...
#include <jevoisbase/Components/RoadFinder/RoadFinder.H>
Public Member Functions | |
| VanishingPoint (Point2D< int > in_vp, float in_likelihood) | |
Public Attributes | |
| Point2D< int > | vp |
| float | prior |
| float | likelihood |
| float | posterior |
| std::vector< Segment > | supportingSegments |
Keeps all the supporting information about a specific vanishing point.
Definition at line 80 of file RoadFinder.H.
|
inline |
Definition at line 82 of file RoadFinder.H.
| float VanishingPoint::likelihood |
Definition at line 88 of file RoadFinder.H.
| float VanishingPoint::posterior |
Definition at line 89 of file RoadFinder.H.
| float VanishingPoint::prior |
Definition at line 87 of file RoadFinder.H.
| std::vector<Segment> VanishingPoint::supportingSegments |
Definition at line 90 of file RoadFinder.H.
| Point2D<int> VanishingPoint::vp |
Definition at line 86 of file RoadFinder.H.
 1.9.8
1.9.8
