|
| By Laurent Itti | itti@usc.edu | http://jevois.org | GPL v3 |
| |||
| Video Mapping: NONE 0 0 0 YUYV 320 240 30.0 JeVois DemoArUco | |||
| Video Mapping: YUYV 320 260 30.0 YUYV 320 240 30.0 JeVois DemoArUco | |||
| Video Mapping: YUYV 640 500 20.0 YUYV 640 480 20.0 JeVois DemoArUco |


Module Documentation
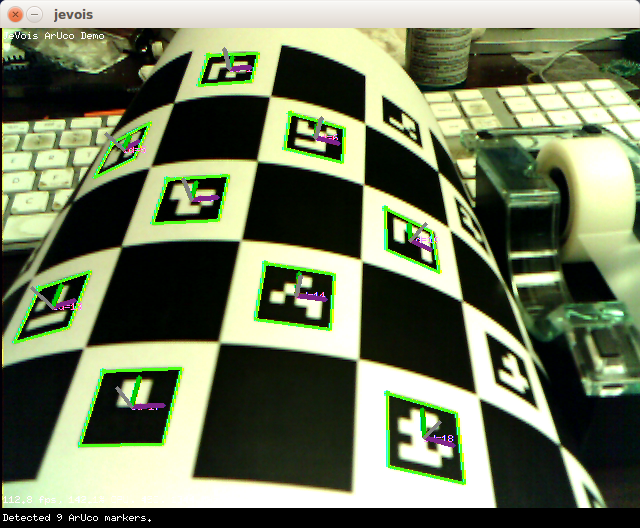
Detect and decode patterns known as ArUco markers, which are small 2D barcodes often used in augmented reality and robotics.
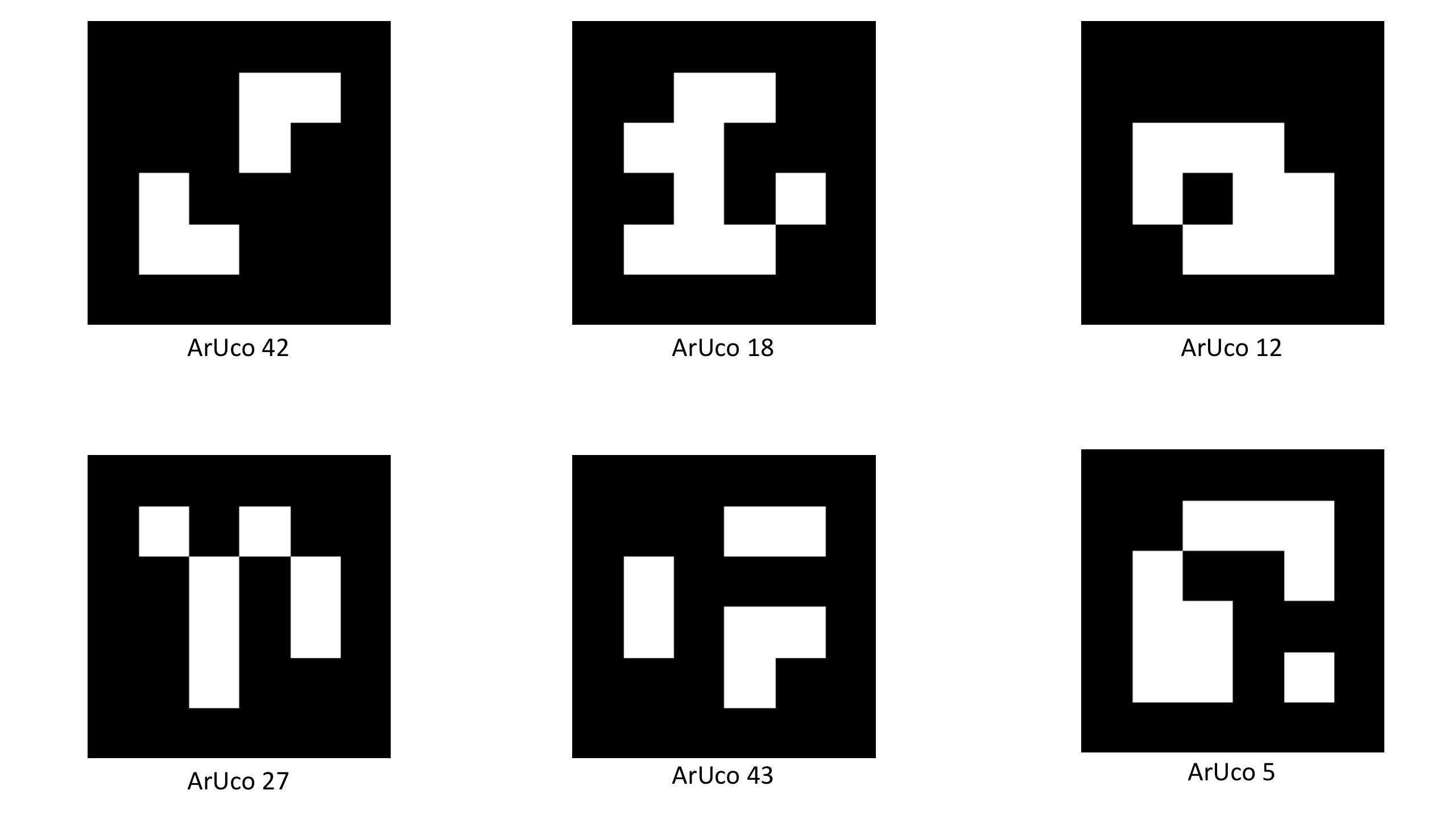
ArUco and AprilTag markers are small 2D barcodes. Each marker corresponds to a number, encoded into a small grid of black and white pixels. The marker decoding algorithm is capable of locating, decoding, and of estimating the pose (location and orientation in space) of any compatible markers in the camera's field of view.
ArUco and AprilTag markers are very useful as tags for many robotics and augmented reality applications. For example, one may place an ArUco next to a robot's charging station, an elevator button, or an object that a robot should manipulate.
The implementation of ArUco used by JeVois is the one of OpenCV-Contrib, documented here: https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html
ArUco and AprilTag markers can be created with several standard dictionaries. Different dictionaries give rise to different numbers of pixels in the markers, and to different numbers of possible symbols that can be created using the dictionary. The default dictionary used by JeVois is ArUco 4x4 with 50 symbols. Other dictionaries are also supported by setting the parameter dictionary over serial port or in a config file, up to 7x7 with 1000 symbols.
Creating and printing markers
We have created the 50 markers available in the default ArUco dictionary (4x4_50) as PNG images that you can download and print, at http://jevois.org/data/ArUco.zip
To make your own, for example, using another dictionary, see the documentation of the ArUco component of JeVoisBase. Some utilities are provided with the component.
Serial Messages
This module can send standardized serial messages as described in Standardized serial messages formatting.
When dopose is turned on, 3D messages will be sent, otherwise 2D messages.
One message is issued for every detected ArUco, on every video frame.
2D messages when dopose is off:
- Serial message type: 2D
id: decoded ArUco marker ID, with a prefix 'U'x,y, or vertices: standardized 2D coordinates of marker center or cornersw,h: standardized marker sizeextra: none (empty string)
3D messages when dopose is on:
- Serial message type: 3D
id: decoded ArUco marker ID, with a prefix 'U'x,y,z, or vertices: 3D coordinates in millimeters of marker center or cornersw,h,d: marker size in millimeters, a depth of 1mm is always usedextra: none (empty string)
If you will use the quaternion data (Detail message style; see Standardized serial messages formatting), you should probably set the serprec parameter to something non-zero to get enough accuracy in the quaternion values.
See Standardized serial messages formatting for more on standardized serial messages, and Helper functions to convert coordinates from camera resolution to standardized for more info on standardized coordinates.
Things to try
- First, use a video viewer software on a host computer and select one of the video modes with video output over USB. Point your JeVois camera towards one of the screenshots provided with this module, or towards some ArUco markers that you find on the web or that you have printed from the collection above (note: the default dictionary is 4x4_50, see parameter
dictionary). - Then try it with no video output, as it would be used by a robot. Connect to the command-line interface of your JeVois camera through the serial-over-USB connection (see Command-line interface user guide; on Linux, you would use sudo screen /dev/ttyACM0 115200) and try:
setpar serout USB setmapping2 YUYV 320 240 30.0 JeVois DemoArUco streamon
and point the camera to some markers; the camera should issue messages about all the markers it identifies.
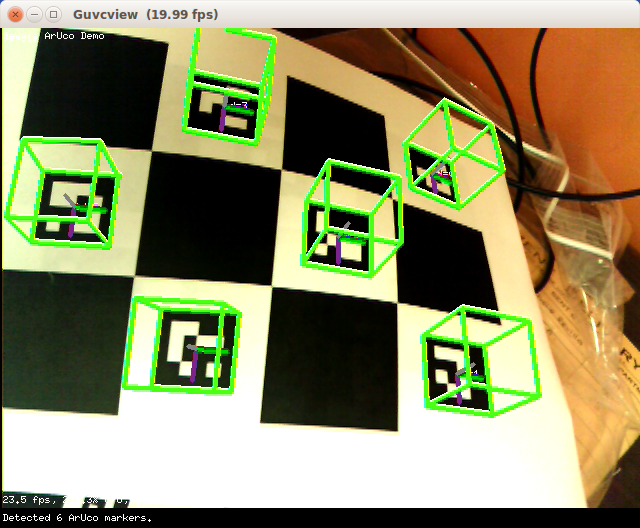
Computing and showing 3D pose
The OpenCV ArUco module can also compute the 3D location and orientation of each marker in the world when dopose is true. The requires that the camera be calibrated, see the documentation of the ArUco component in JeVoisBase. A generic calibration that is for a JeVois camera with standard lens is included in files calibration640x480.yaml, calibration352x288.yaml, etc in the jevoisbase share directory (on the MicroSD, this is in JEVOIS:/share/camera/).
When doing pose estimation, you should set the markerlen parameter to the size (width) in millimeters of your actual physical markers. Knowing that size will allow the pose estimation algorithm to know where in the world your detected markers are.
For more about camera calibration, see this tutorial and http://jevois.org/basedoc/ArUco_8H_source.html
Tutorial and video
Check out this tutorial on how to build a simple visually-guided toy robot car for under $100 with JeVois, which uses ArUco at its core. A demo video is here:
| Parameter | Type | Description | Default | Valid Values |
|---|---|---|---|---|
| (ArUco) detparams | std::string | Filename of detector parameters, or empty - Note that this parameter cannot be changed at runtime (must be set in the module's params.cfg). | - | |
| (ArUco) dictionary | Dict | Symbol dictionary to use - Note that this parameter cannot be changed at runtime (must be set in the module's params.cfg). | Dict::D4X4_50 | Dict_Values |
| (ArUco) dopose | bool | Compute (and show) pose vectors, requires a valid camera calibration | false | - |
| (ArUco) markerlen | float | Marker side length (millimeters), used only for pose estimation | 100.0F | - |
| (ArUco) showcube | bool | Show a 3D cube on top of each detected marker, when dopose is also true | false | - |
| Detailed docs: | DemoArUco |
|---|---|
| Copyright: | Copyright (C) 2016 by Laurent Itti, iLab and the University of Southern California |
| License: | GPL v3 |
| Distribution: | Unrestricted |
| Restrictions: | None |
| Support URL: | http://jevois.org/doc |
| Other URL: | http://iLab.usc.edu |
| Address: | University of Southern California, HNB-07A, 3641 Watt Way, Los Angeles, CA 90089-2520, USA |