|
JeVois Tutorials
1.23
JeVois Smart Embedded Machine Vision Tutorials
|

|
|

Loading...
Searching...
No Matches
|
JeVois Tutorials
1.23
JeVois Smart Embedded Machine Vision Tutorials
|
|
|
In addition to producing video outputs, JeVois machine vision modules can send message over serial ports, for example to inform an Arduino or other robotic controller of what JeVois is seeing.
JeVois distinguishes between two types of serial communications:
1) serlog: For log messages (error messages, notices to users, etc). Log messages are categorized into severity tiers, and always start with DBG (for debug level), INF (info level), ERR (error level), or FTL (fatal error level). Log messages are intended for human consumption. They would typically be turned on during algorithm development and debugging, then turned off during production use.
2) serout: For text-based outputs intended to be consumed by a machine (e.g., coordinates of an object detected by JeVois, to send to an Arduino).
The assignment of actual ports, such as hardware 4-pin connector vs serial-over-USB port, to serlog and serout is controlled by parameters, detailed below. The assignment is very flexible, for example, you can decide to send serlog messages to both the 4-pin hardware serial port and to the serial-over-USB port, or or to no port, or to just one port, etc while sending serout messages to the hardware 4-pin serial port only, or all ports, no ports, etc.
In JeVois Inventor, at the top of the Console tab, toggle buttons are available to allow you to send loge messages to nowhere, serial-over-USB port, 4-pin port, or both, and likewise for module output messages.
See Command-line interface user guide for more information.
Here, we will start from where we ended in ProgrammerInvTimer: a simple ArUco tag detector written in Python + OpenCV using JeVois Inventor.
If you have not yet done so, create a new module called Hello now, as follows:
CTRL-N).Fill in the details as shown below:
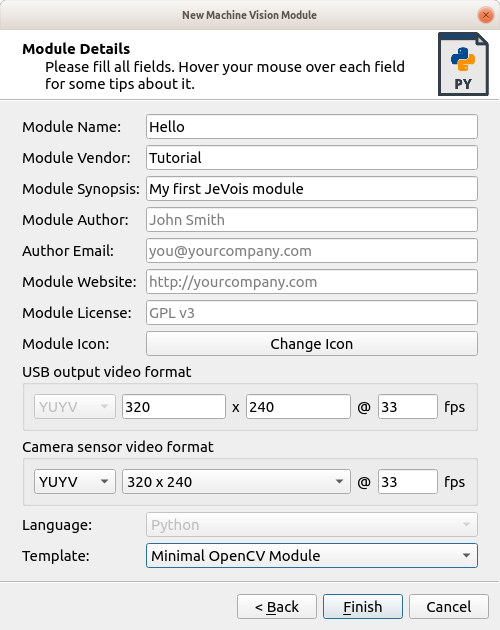
See Hello JeVois using JeVois Inventor for more details.
The JeVois core provides the following helper functions available in Python:
jevois.LDEBUG(), jevois.LINFO(), jevois.LERROR(), and jevois.LFATAL() to send messages of various severity to the serlog channel.LDEBUG level is disabled at compile-time by default. So, you should not use it unless you have recompiled the JeVois core from source and enabled it.jevois.LFATAL() also throws an exception after it sends the message. So you should only use it in cases where an error has occurred which prevents you from going further (as is usually the case for exceptions: throw an exception when the postcondition of your function cannot be achieved; here, the postcondition is that we have sent a video frame to USB depicting results of our machine vision work). JeVois core will catch the exception and display it in the video stream.jevois.sendSerial() to help you send machine vision result strings to either the 4-pin serial port of JeVois, or to the serial-over-USB port. To which port the messages will be sent to is determined by the serout parameter, as explained above.From the previous tutorial, we start with this code:
Let us add code to send information about each detected ArUco maker to our serout serial ports. To keep it simple in this tutorial let us first just focus on what was detected (ArUco ID numbers) and we will later focus on where those were detected (coordinates of corners).
First, we need to get an idea of what type that ids variable returned by the ArUco module's detectMarkers() function is. The OpenCV docs just say OutputArray, and in C++ it should be a vector of unsigned integers.
To check that, let us add a line to our code, just after we get the ids, that will send some debug message to the jevois console:
jevois.LINFO('ids type is {}'.format(type(ids)))
and then we switch to the Console tab of JeVois Inventor. Toggling USB on for log messages informs us that:
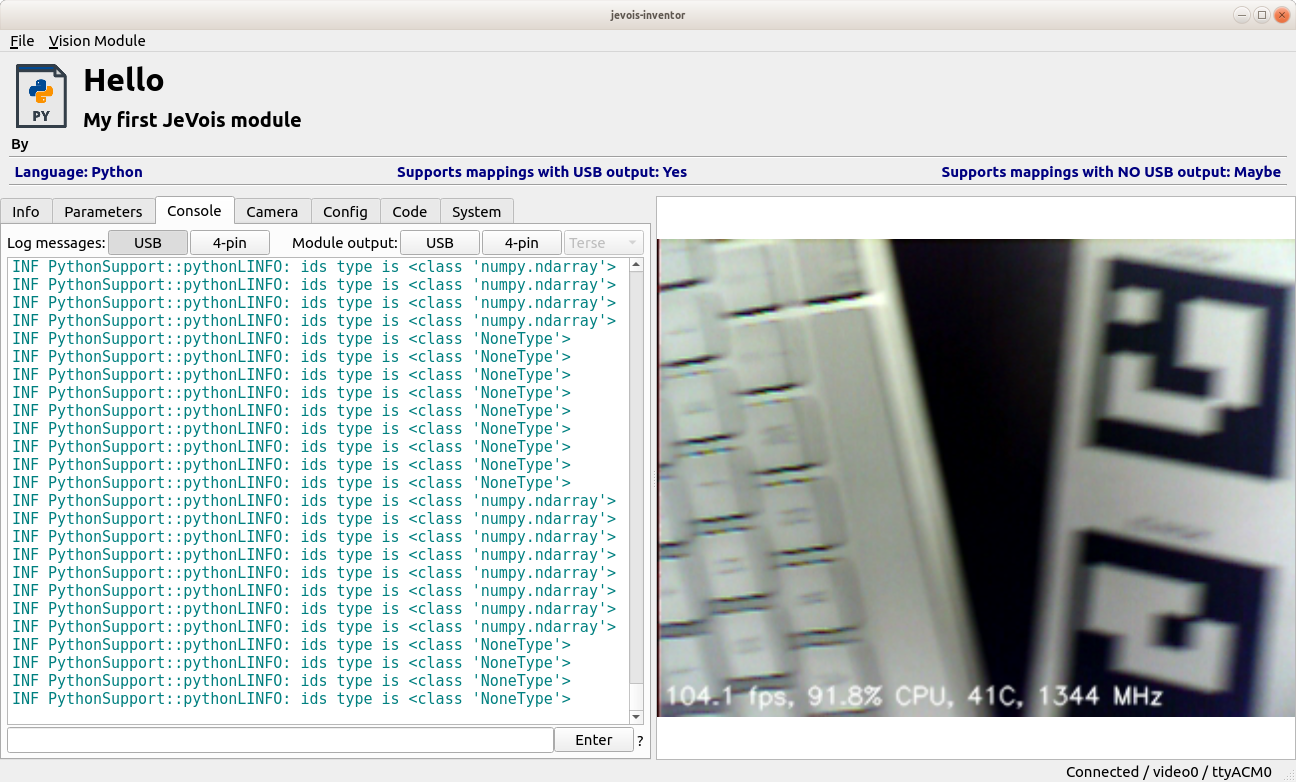
depending on whether we are looking at some ArUco (then it is a numpy ndarray), or not (then NoneType). Welcome to Python and dynamic typing I guess... Indeed, when developing code in Python + OpenCV, most of my time is spent trying to figure out what the data type may be of the various results returned by OpenCV functions. Let us delete that LINFO line now and get to parsing these ids. We need to first detect whether the ids is of type None, and, if not, we should be able to iterate over the ndarray. After some more fiddling around we insert 3 new lines of code just after the call to drawDetectedMarkers():
Switching to the Console, and toggling serial outputs to USB on, we can see our messages, when JeVois is pointed towards some ArUco markers:
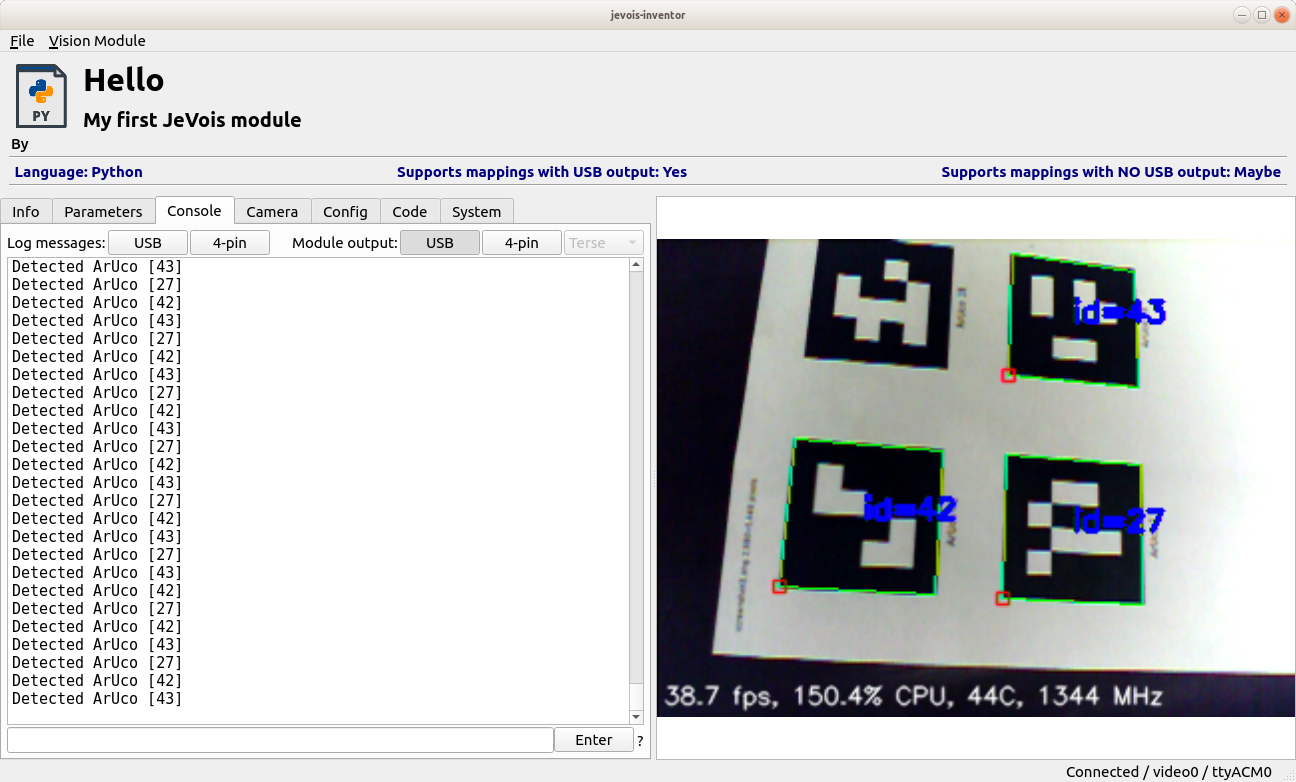
Try to parse and send the coordinates as well!
For further reading:
For tutorials on how to write Arduino or Python code to receive and decode messages sent by JeVois, see:
 1.9.8
1.9.8
{kind=link}
{kind=link}
{kind=link}