|
JeVois Tutorials
1.23
JeVois Smart Embedded Machine Vision Tutorials
|

|
|

Loading...
Searching...
No Matches
|
JeVois Tutorials
1.23
JeVois Smart Embedded Machine Vision Tutorials
|
|
|
JeVois v1.10.0
This tutorial shows you how to configure your JeVois smart camera for standalone, headless operation. In this mode, JeVois does not require a host computer. It can run machine vision algorithms and will not produce any video to be sent over the USB link. It can still send text messages, either to the hardware 4-pin serial port, or to the serial-over-USB port.
JeVois supports two basic modes of operation:
For more details, see Concepts used throughout this documentation
Note that not all machine vision modules support both modes of operation. That is up to the programmer of the module. To see whether headless operation is supported, refer to each module's documentation page, by clicking on the appropriate module in the list in UserDemos. Towards the top of the module's docs, it is indicated whether it supports operation (video mappings) with and without video over USB.
When JeVois is connected to a host computer, that host computer controls what JeVois will do, as the host requests video at a given resolution and framerate. When no host computer is connected, we need to instruct JeVois what to do. This is achieved through the initscript.cfg which is a script that is run when JeVois starts up. In that script, we can write commands that tell JeVois which headless machine vision processing module to use.
To enable headless operation, you need at least two commands in initscript.cfg:
setmapping2 command to select which machine vision module to run.streamon command to start the camera video stream.Starting with JeVois v1.10 and JeVois Inventor 0.3, you can use JeVois Inventor to achieve this easily.
Let's assume we want an autonomous robot to detect ArUco markers and drive towards them (as in Build a simple visually-guided toy robot car for under $100 with JeVois). We will use JeVois module DemoArUco, which supports operation with and without USB video output.
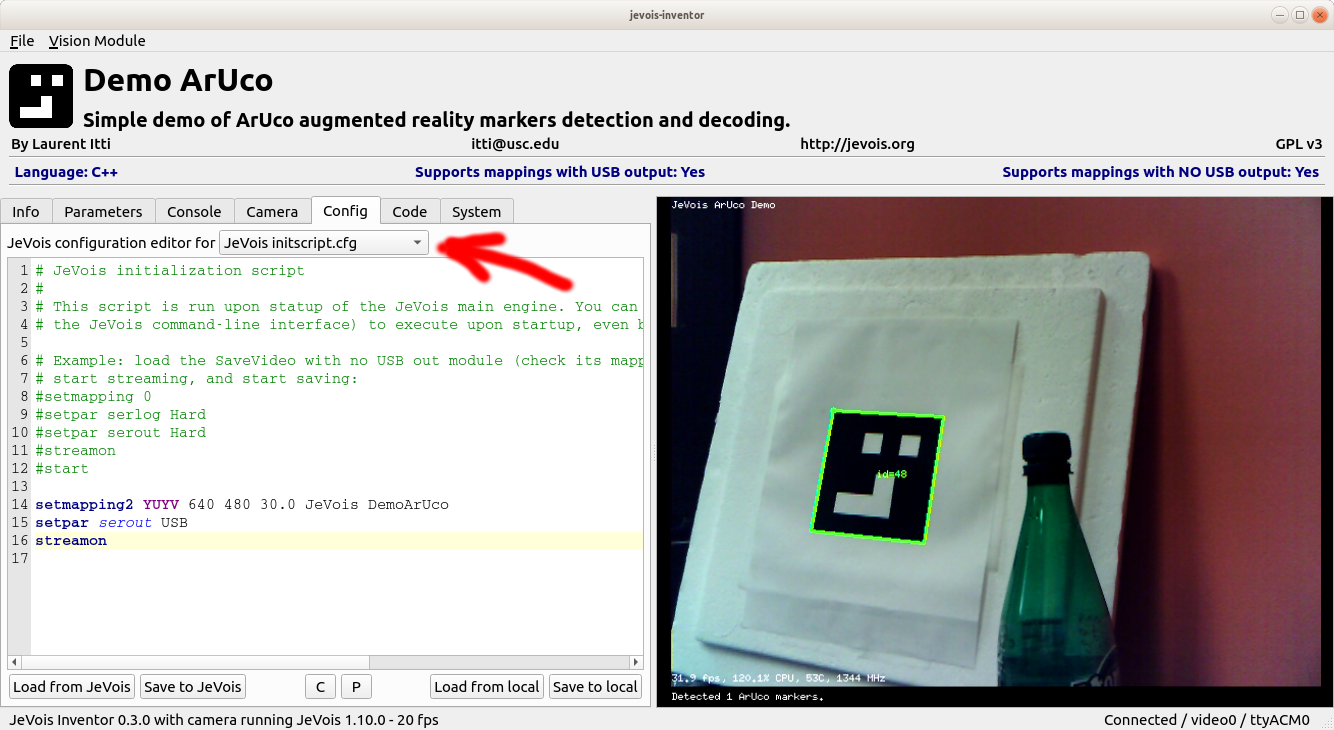
In JeVois Inventor, under the Config tab, we select file JeVois initscript.cfg, which launches an editor for the config file JEVOIS:/config/initscript.cfg on the microSD card inside JeVois.
We enter the following lines:
setmapping2 YUYV 640 480 30.0 JeVois DemoArUco setpar serout USB streamon
The setmapping2 selects a camera pixel format (YUYV), resolution (640x480), and framerate (30.0fps), and the machine vision module DemoArUco from vendor JeVois. The specification for setmapping2 is:
setmapping2 <pixelformat> <width> <height> <fps> <Vendor> <Module>
See Command-line interface user guide for more details. You should make sure that the pixel format, resolution, and fps you choose are supported by the module. Usually, the list of sample video mappings provided in the module's documentation page is the best way to start. For example, for DemoArUco, we see that it supports:
Video Mapping: NONE 0 0 0 YUYV 320 240 30.0 JeVois DemoArUco Video Mapping: YUYV 320 260 30.0 YUYV 320 240 30.0 JeVois DemoArUco Video Mapping: YUYV 640 500 20.0 YUYV 640 480 20.0 JeVois DemoArUco
Remember that video mappings start by specifying the output format (when streaming video to USB), then the camera sensor format. See Advanced topic: Video mappings and configuring machine vision modes for more details. Here, looking at the second half of the 3 above entries, it looks like running the camera sensor at 320x240 or 640x480 in YUYV should work fine, and if it can do 20fps with video output, we'll try 30fps with no video output (no-video-output usually runs faster since there is no need to construct an output image and to send it over USB).
The streamon command will actually start the video streaming. Don't forget it! We do not automatically start streaming when setmapping2 is executed to allow the user to set paramaters of the machine vision module after it is loaded and before we start running it. Here, for example, we decide to send text messages about the detected markers to serial-over-USB (command setpar serout USB).
Before we save the file (which will reboot JeVois), it may be a good idea to point JeVois towards and ArUco, select the DemoArUco module from the Vision Module menu, and confirm that the arUco is detected. Once we go headless, assuming that we have not moved the camera, that ArUco should still be detected, and we should see that in the Console tab of the Inventor.
Click Save to JeVois and JeVois will restart.
When it restarts, it will still show the default module, DemoSaliency:
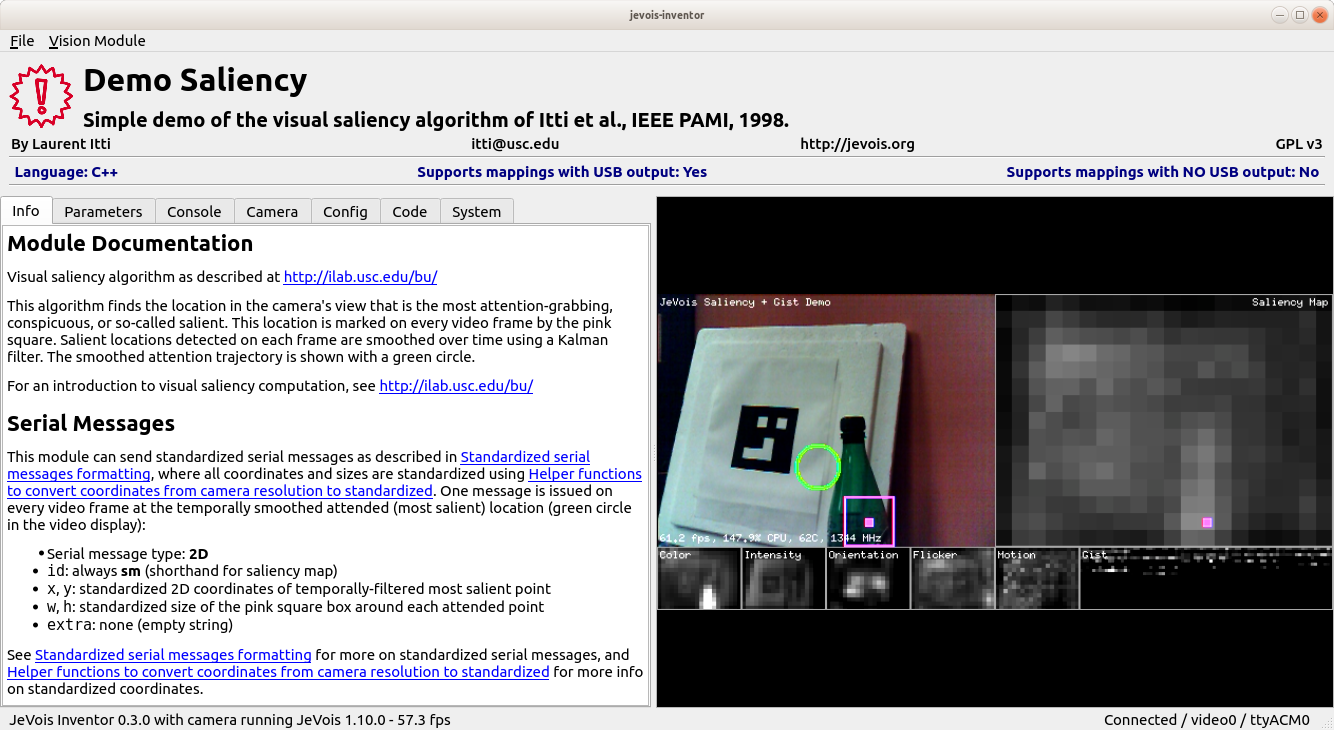
What happened? Well, in fact, our headless DemoArUco module did load and start in headless mode, but then the Inventor detected that JeVois got connected to the host computer, and decided to take over and to run DemoSaliency with video output to USB. So we need to tell the Inventor to not request video from JeVois as soon as JeVois is connected. For that, we turn to the System tab and click the Go Headless button. This will turn off the video capture component of the Inventor. So next time JeVois is detected, the Inventor will not request any video from it.
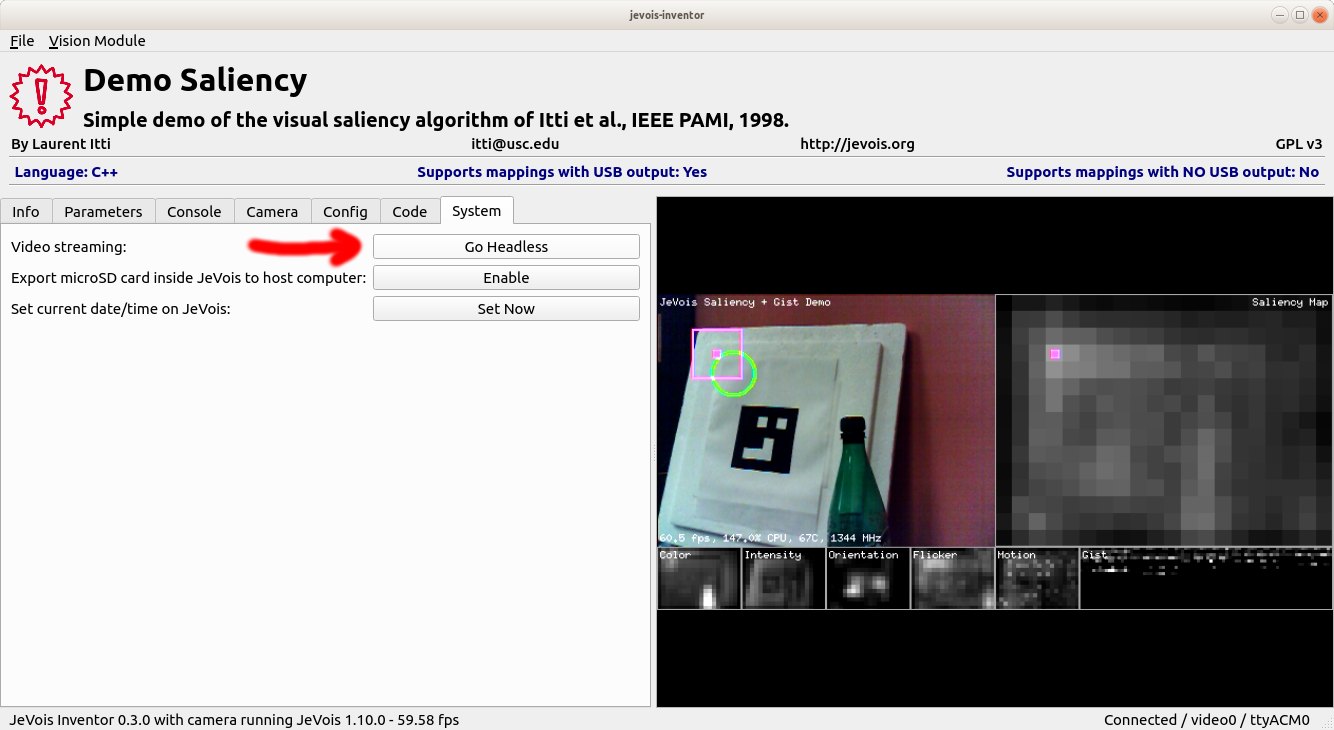
After we click Go Headless button, JeVois restarts one more time, runs its initscript.cfg upon boot, which loads and starts DemoArUco in headless mode.
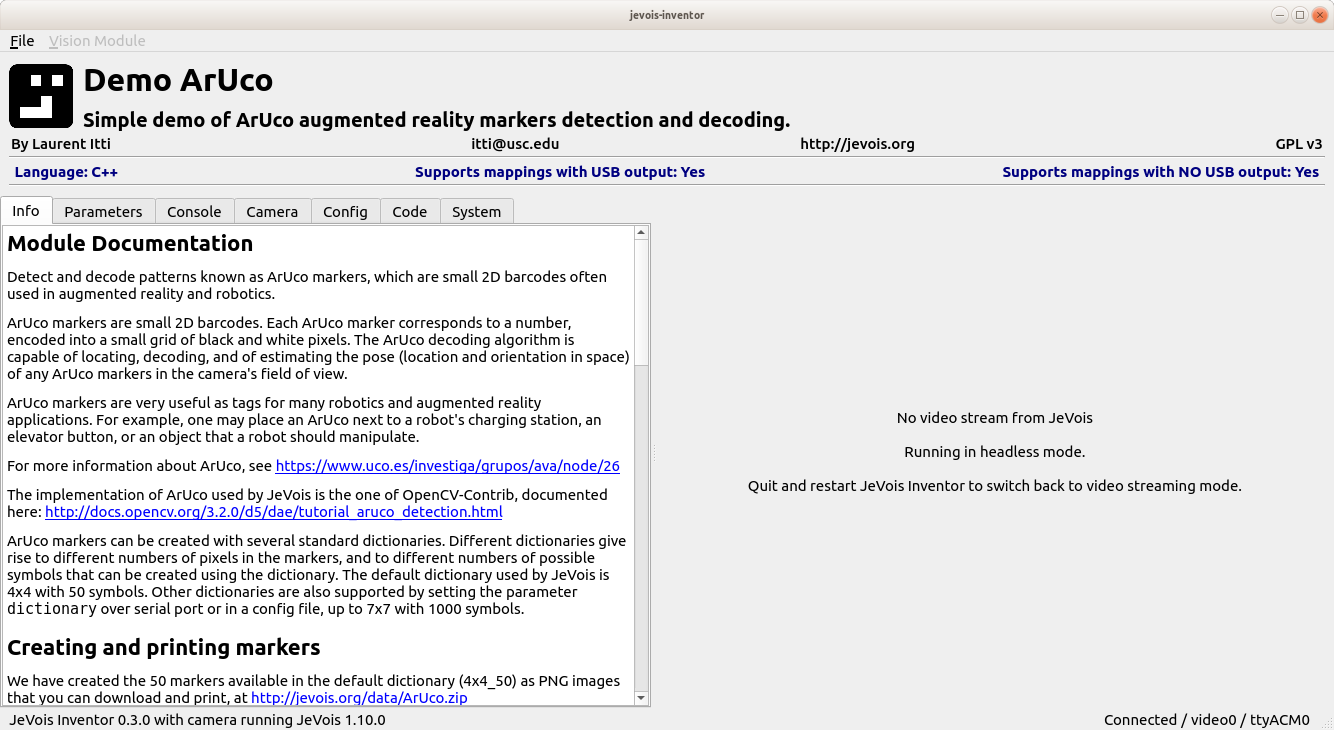
We confirm that our ArUco marker is being detected by switching to the Console view (here we also changed the serial style to Detail to get the ArUco symbol number, here U48):
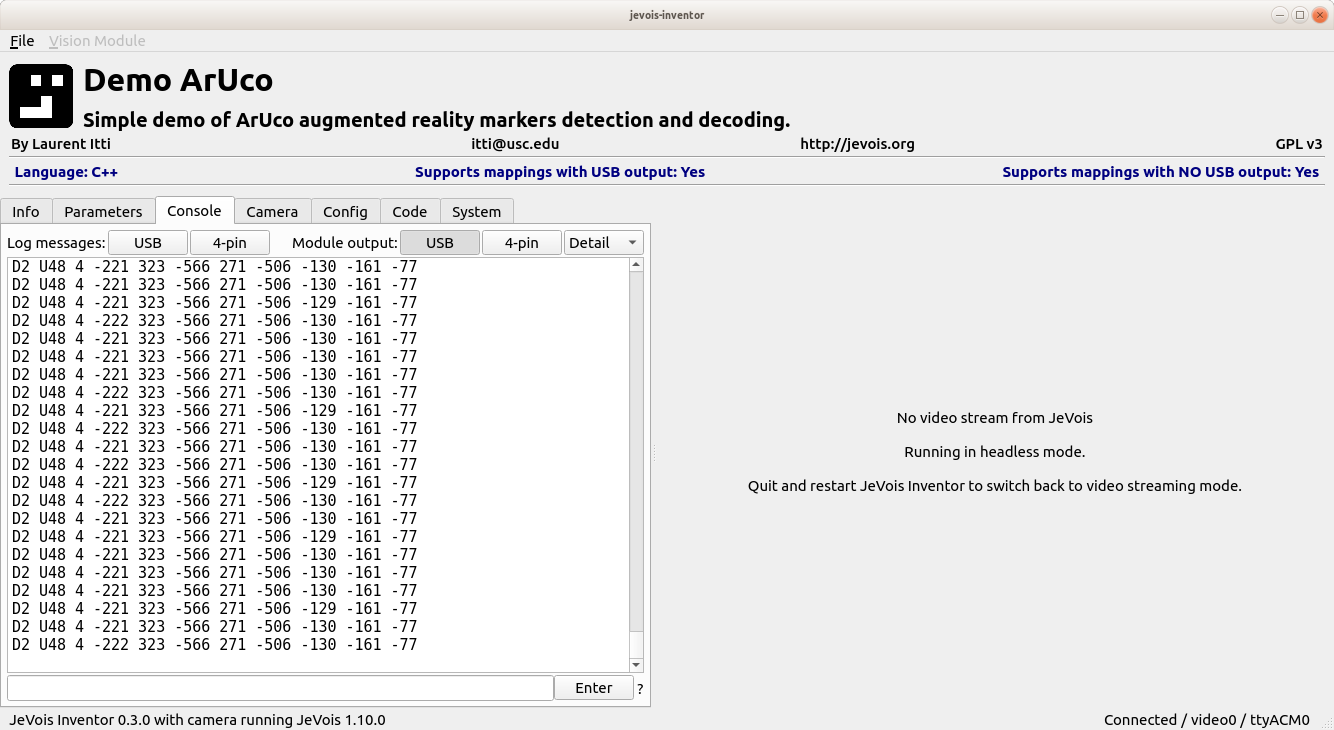
To switch back to normal operation, you will need to quit and restart the Inventor, once it has gone headless it cannot go back to grabbing video (due to what we believe is a bug in Qt, the graphical widget toolkit we use to develop the Inventor).
If you are not going to need headless operation anymore, you should also delete the lines we added to initscript.cfg to avoid wasting time when JeVois boots up.
setpar serout Hard instead, in initscript.cfg  1.9.8
1.9.8
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}