|
JeVois
1.23
JeVois Smart Embedded Machine Vision Toolkit
|
|
|
JeVois
1.23
JeVois Smart Embedded Machine Vision Toolkit
|
|
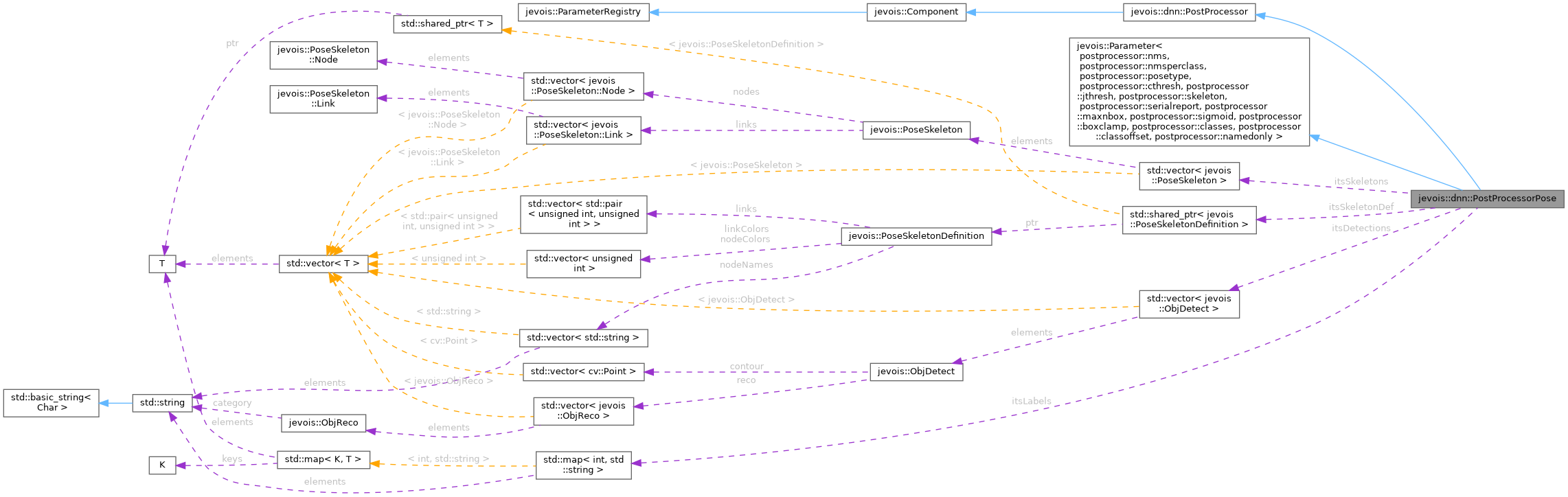
#include <jevois/DNN/PostProcessorPose.H>
Post-Processor for neural network pipeline, for human/animal/other pose detection (skeleton)
This is the last step in a deep neural network processing Pipeline. It estimates the pose (skeleton) of humans or animals seen by the camera.
Definition at line 35 of file PostProcessorPose.H.
Public Member Functions | |
| virtual | ~PostProcessorPose () |
| Destructor. | |
| void | freeze (bool doit) override |
| Freeze/unfreeze parameters that users should not change while running. | |
| void | process (std::vector< cv::Mat > const &outs, PreProcessor *preproc) override |
| Process outputs and draw/send some results. | |
| void | report (jevois::StdModule *mod, jevois::RawImage *outimg=nullptr, jevois::OptGUIhelper *helper=nullptr, bool overlay=true, bool idle=false) override |
| Report what happened in last process() to console/output video/GUI. | |
| std::vector< ObjDetect > const & | latestDetections () const |
| Get the latest detections, use with caution, not thread-safe. | |
| std::vector< PoseSkeleton > const & | latestSkeletons () const |
| Get the latest skeletons, use with caution, not thread-safe. | |
 Public Member Functions inherited from jevois::dnn::PostProcessor Public Member Functions inherited from jevois::dnn::PostProcessor | |
| virtual | ~PostProcessor () |
| Destructor. | |
| Public Member Functions inherited from jevois::Component | |
| Component (std::string const &instance) | |
| Constructor. | |
| virtual | ~Component () |
| Virtual destructor for safe inheritance. | |
| template<class Comp , typename... Args> | |
| std::shared_ptr< Comp > | addSubComponent (std::string const &instance, Args &&...args) |
| Pseudo-constructor: construct and add another component as a subcomponent of this one. | |
| template<class Comp > | |
| void | removeSubComponent (std::shared_ptr< Comp > &component) |
| Remove a sub-Component from this Component, by shared_ptr. | |
| void | removeSubComponent (std::string const &instance, bool warnIfNotFound=true) |
| Remove a sub-Component from this Component, by instance name. | |
| template<class Comp = jevois::Component> | |
| std::shared_ptr< Comp > | getSubComponent (std::string const &instance) const |
| Get a sub-component by instance name. | |
| bool | isTopLevel () const |
| Returns true if this component is top-level, i.e., its parent is jevois::Manager. | |
| bool | initialized () const |
| Has this component been initialized yet? | |
| std::string const & | className () const |
| The class name of this component. | |
| std::string const & | instanceName () const |
| The instance name of this component. | |
| template<typename T > | |
| std::vector< std::string > | setParamVal (std::string const ¶mdescriptor, T const &val) |
| Set a parameter value. | |
| template<typename T > | |
| void | setParamValUnique (std::string const ¶mdescriptor, T const &val) |
| Set a parameter value, simple version assuming only one parameter match. | |
| template<typename T > | |
| std::vector< std::pair< std::string, T > > | getParamVal (std::string const ¶mdescriptor) const |
| Get parameter(s) value(s) by descriptor. | |
| template<typename T > | |
| T | getParamValUnique (std::string const ¶mdescriptor) const |
| Get a parameter value, simple version assuming only one parameter match. | |
| std::vector< std::string > | setParamString (std::string const ¶mdescriptor, std::string const &val) |
| Set a parameter value, by string. | |
| void | setParamStringUnique (std::string const ¶mdescriptor, std::string const &val) |
| Set a parameter value by string, simple version assuming only one parameter match. | |
| std::vector< std::pair< std::string, std::string > > | getParamString (std::string const ¶mdescriptor) const |
| Get a parameter value, by string. | |
| std::string | getParamStringUnique (std::string const ¶mdescriptor) const |
| Get a parameter value by string, simple version assuming only one parameter match. | |
| void | freezeParam (std::string const ¶mdescriptor, bool doit) |
| Freeze/unfreeze a parameter, by name, see ParameterBase::freeze() | |
| void | freezeAllParams (bool doit) |
| Freeze all parameters. | |
| void | hideParam (std::string const ¶mdescriptor, bool doit) |
| Hide/unhide a parameter, by name, see ParameterBase::hide() | |
| void | hideAllParams (bool doit) |
| Hide all parameters. | |
| std::string | descriptor () const |
| Get our full descriptor (including all parents) as [Instancename]:[...]:[...]. | |
| void | setParamsFromFile (std::string const &filename) |
| Set some parameters from a file. | |
| std::istream & | setParamsFromStream (std::istream &is, std::string const &absfile) |
| Set some parameters from an open stream. | |
| virtual void | paramInfo (std::shared_ptr< UserInterface > s, std::map< std::string, std::string > &categs, bool skipFrozen, std::string const &cname="", std::string const &pfx="") |
| Get machine-oriented descriptions of all parameters. | |
| void | foreachParam (std::function< void(std::string const &compname, ParameterBase *p)> func, std::string const &cname="") |
| Run a function on every param we hold. | |
| template<typename T > | |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ParameterCategory const &category) |
| Add a new parameter after the Component has already been constructed. | |
| template<typename T , template< typename > class ValidValuesSpec> | |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ValidValuesSpec< T > const &validValuesSpec, ParameterCategory const &category) |
| Add a new parameter after the Component has already been constructed. | |
| template<typename T > | |
| void | setDynamicParameterCallback (std::string const &name, std::function< void(T const &)> cb, bool callnow=true) |
| Register a callback with a previously created dynamic parameter. | |
| void | removeDynamicParameter (std::string const &name, bool throw_if_not_found=true) |
| Remove a previously added dynamic parameter. | |
| void | setPath (std::string const &path) |
| Assign a filesystem path to this component. | |
| std::filesystem::path | absolutePath (std::filesystem::path const &path="") |
| If given path is relative (not starting with /), prepend the Component path to it. | |
| Public Member Functions inherited from jevois::ParameterRegistry | |
| virtual | ~ParameterRegistry () |
| Virtual destructor for safe inheritance. | |
Protected Member Functions | |
| void | onParamChange (postprocessor::classes const ¶m, std::string const &val) override |
| void | onParamChange (postprocessor::skeleton const ¶m, std::string const &val) override |
| Protected Member Functions inherited from jevois::Component | |
| virtual void | preInit () |
| Called before all sub-Components are init()ed. | |
| virtual void | postInit () |
| Called after all sub-Components are init()ed. | |
| virtual void | preUninit () |
| Called before all sub-Components are uninit()ed. | |
| virtual void | postUninit () |
| Called after all sub-Components are uninit()ed. | |
| Protected Member Functions inherited from jevois::ParameterRegistry | |
| void | addParameter (ParameterBase *const param) |
| The Parameter class uses this method to register itself on construction with its owning Component. | |
| void | removeParameter (ParameterBase *const param) |
| The Parameter class uses this method to un-register itself on destruction with its owning Component. | |
| void | callbackInitCall () |
| For all parameters that have a callback which has never been called, call it with the default param value. | |
Protected Attributes | |
| std::map< int, std::string > | itsLabels |
| Mapping from object ID to class name. | |
| HailoROIPtr | itsROI = std::make_shared<HailoROI>(HailoROI(HailoBBox(0.0f, 0.0f, 1.0f, 1.0f))) |
| std::pair< std::vector< KeyPt >, std::vector< PairPairs > > | itsKeypointsAndPairs |
| std::shared_ptr< jevois::PoseSkeletonDefinition > | itsSkeletonDef |
| cv::Size | itsImageSize |
| std::vector< ObjDetect > | itsDetections |
| std::vector< PoseSkeleton > | itsSkeletons |
Related Symbols | |
(Note that these are not member symbols.) | |
| JEVOIS_DECLARE_PARAMETER (jthresh, float, "Joint confidence threshold for pose detection", 50.0F, jevois::Range< float >(0.0F, 100.0F), ParamCateg) | |
| Parameter. | |
| JEVOIS_DEFINE_ENUM_CLASS (PoseType,(YOLOv8HAILO)(YOLOv8)(YOLOv8t)) | |
| Enum. | |
| JEVOIS_DECLARE_PARAMETER (posetype, PoseType, "Type of pose output format", PoseType::YOLOv8HAILO, PoseType_Values, ParamCateg) | |
| Parameter. | |
| JEVOIS_DECLARE_PARAMETER_WITH_CALLBACK (skeleton, std::string, "YAML file name for definition of pose skeleton. " "Defines number of joints and links, their names, and their " "colors for drawing. If file name is relative, it will be with respect " "to " JEVOIS_SHARE_PATH, "dnn/skeletons/Coco17.yml", ParamCateg) | |
| Parameter. | |
|
virtual |
Destructor.
Definition at line 35 of file PostProcessorPose.C.
|
overridevirtual |
Freeze/unfreeze parameters that users should not change while running.
Implements jevois::dnn::PostProcessor.
Definition at line 39 of file PostProcessorPose.C.
| std::vector< jevois::ObjDetect > const & jevois::dnn::PostProcessorPose::latestDetections | ( | ) | const |
Get the latest detections, use with caution, not thread-safe.
This returns a reference to our internal vector of detections. That vector will get overwritten every time process() is called. It is ok to use this after you have called process() on a given frame, or, if using a Pipeline, after you have called Pipeline::process(). Do not hold this ref past the end of the current video frame. If you need to keep a persistent copy of the data, make a deep copy of the vector.
Definition at line 555 of file PostProcessorPose.C.
| std::vector< jevois::PoseSkeleton > const & jevois::dnn::PostProcessorPose::latestSkeletons | ( | ) | const |
Get the latest skeletons, use with caution, not thread-safe.
This returns a reference to our internal vector of skeletons. That vector will get overwritten every time process() is called. It is ok to use this after you have called process() on a given frame, or, if using a Pipeline, after you have called Pipeline::process(). Do not hold this ref past the end of the current video frame. If you need to keep a persistent copy of the data, make a deep copy of the vector.
Definition at line 559 of file PostProcessorPose.C.
|
overrideprotected |
Definition at line 47 of file PostProcessorPose.C.
References jevois::dnn::getClassLabels().
|
overrideprotected |
Definition at line 54 of file PostProcessorPose.C.
|
overridevirtual |
Process outputs and draw/send some results.
Implements jevois::dnn::PostProcessor.
Definition at line 60 of file PostProcessorPose.C.
References jevois::dnn::PreProcessor::b2i(), jevois::dnn::PreProcessor::blobsize(), jevois::dnn::clamp(), jevois::Component::descriptor(), filter_keypoints(), jevois::Manager::getComponent(), jevois::dnn::getLabel(), jevois::dnn::PreProcessor::imagesize(), LFATAL, jevois::PoseSkeleton::linkDefinitions(), jevois::PoseSkeleton::links, LTHROW, jevois::PoseSkeleton::nodes, o, jevois::dnn::NetworkHailo::outputInfos(), jevois::dnn::shapestr(), jevois::dnn::sigmoid(), jevois::dnn::softmax_dfl(), jevois::split(), and yolov8pose_postprocess().
|
overridevirtual |
Report what happened in last process() to console/output video/GUI.
Implements jevois::dnn::PostProcessor.
Definition at line 472 of file PostProcessorPose.C.
References jevois::GUIhelper::drawCircle(), jevois::rawimage::drawCircle(), jevois::GUIhelper::drawLine(), jevois::rawimage::drawLine(), jevois::GUIhelper::drawRect(), jevois::rawimage::drawRect(), jevois::GUIhelper::drawText(), jevois::rawimage::Font10x20, jevois::yuyv::LightGreen, o, jevois::StdModule::sendSerialObjDetImg2D(), jevois::sformat(), jevois::dnn::stringToRGBA(), and jevois::rawimage::writeText().
|
related |
Parameter.
|
related |
Parameter.
|
related |
Parameter.
|
related |
Enum.
|
protected |
Definition at line 87 of file PostProcessorPose.H.
|
protected |
Definition at line 86 of file PostProcessorPose.H.
|
protected |
Definition at line 83 of file PostProcessorPose.H.
|
protected |
Mapping from object ID to class name.
Definition at line 79 of file PostProcessorPose.H.
|
protected |
Definition at line 82 of file PostProcessorPose.H.
|
protected |
Definition at line 85 of file PostProcessorPose.H.
|
protected |
Definition at line 88 of file PostProcessorPose.H.
 1.9.8
1.9.8
