|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
|
JeVoisBase
1.23
JeVois Smart Embedded Machine Vision Toolkit Base Modules
|
|
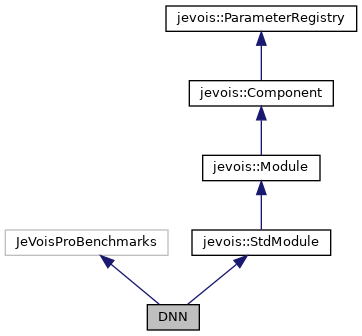
Detect and recognize multiple objects in scenes using OpenCV, NPU, TPU, or VPU Deep Neural Nets. More...
Public Member Functions | |
| DNN (std::string const &instance) | |
| Constructor. | |
| virtual | ~DNN () |
| Virtual destructor for safe inheritance. | |
| void | doprocess (jevois::InputFrame const &inframe, jevois::RawImage *outimg, jevois::OptGUIhelper *helper, bool idle) |
| Processing function implementation. | |
| virtual void | process (jevois::InputFrame &&inframe) override |
| Processing function, no video output. | |
| virtual void | process (jevois::InputFrame &&inframe, jevois::OutputFrame &&outframe) override |
| Processing function with video output to USB on JeVois-A33. | |
| virtual void | process (jevois::InputFrame &&inframe, jevois::GUIhelper &helper) override |
| Processing function with zero-copy and GUI on JeVois-Pro. | |
 Public Member Functions inherited from jevois::StdModule Public Member Functions inherited from jevois::StdModule | |
| StdModule (std::string const &instance) | |
| virtual | ~StdModule () |
| void | sendSerialImg1Dx (unsigned int camw, float x, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd1Dx (float x, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialImg1Dy (unsigned int camh, float y, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd1Dy (float y, float size=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialImg2D (unsigned int camw, unsigned int camh, float x, float y, float w=0.0F, float h=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd2D (float x, float y, float w=0.0F, float h=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialContour2D (unsigned int camw, unsigned int camh, std::vector< cv::Point_< T > > points, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd3D (float x, float y, float z, float w=0.0F, float h=0.0F, float d=0.0F, float q1=0.0F, float q2=0.0F, float q3=0.0f, float q4=0.0F, std::string const &id="", std::string const &extra="") |
| void | sendSerialStd3D (std::vector< cv::Point3f > points, std::string const &id="", std::string const &extra="") |
| void | sendSerialObjReco (std::vector< ObjReco > const &res) |
| void | sendSerialObjDetImg2D (unsigned int camw, unsigned int camh, float x, float y, float w, float h, std::vector< ObjReco > const &res) |
| void | sendSerialObjDetImg2D (unsigned int camw, unsigned int camh, ObjDetect const &det) |
| void | sendSerialObjDetImg2D (unsigned int camw, unsigned int camh, ObjDetectOBB const &det) |
| JEVOIS_DEFINE_ENUM_CLASS (SerStyle,(Terse)(Normal)(Detail)(Fine)) | |
| JEVOIS_DECLARE_PARAMETER (serstyle, SerStyle, "Style for standardized serial messages as defined in " "http://jevois.org/doc/UserSerialStyle.html", SerStyle::Terse, SerStyle_Values, ParamCateg) | |
| JEVOIS_DECLARE_PARAMETER (serprec, unsigned int, "Number of decimal points in standardized serial messages as " "defined in http://jevois.org/doc/UserSerialStyle.html", 0U, jevois::Range< unsigned int >(0U, 10U), ParamCateg) | |
| JEVOIS_DEFINE_ENUM_CLASS (SerStamp,(None)(Frame)(Time)(FrameTime)(FrameDateTime)) | |
| JEVOIS_DECLARE_PARAMETER (serstamp, SerStamp, "Prepend standardized serial messages with a frame number, " "time, frame+time, or frame+date+time. See details in " "http://jevois.org/doc/UserSerialStyle.html", SerStamp::None, SerStamp_Values, ParamCateg) | |
| JEVOIS_DEFINE_ENUM_CLASS (SerMark,(None)(Start)(Stop)(Both)) | |
| JEVOIS_DECLARE_PARAMETER (sermark, SerMark, "Send serial message to mark the beginning (MARK START) of the " "processing of a video frame from the camera sensor, the end (MARK STOP), or both. " "Useful, among others, if one needs to know when no results were sent over serial " "on a given frame. Combine with parameter serstamp if you need to know the frame number.", SerMark::None, SerMark_Values, ParamCateg) | |
| Public Member Functions inherited from jevois::Module | |
| Module (std::string const &instance) | |
| virtual | ~Module () |
| virtual void | sendSerial (std::string const &str) |
| virtual void | parseSerial (std::string const &str, std::shared_ptr< UserInterface > s) |
| virtual void | supportedCommands (std::ostream &os) |
| Public Member Functions inherited from jevois::Component | |
| Component (std::string const &instance) | |
| virtual | ~Component () |
| std::shared_ptr< Comp > | addSubComponent (std::string const &instance, Args &&...args) |
| void | removeSubComponent (std::shared_ptr< Comp > &component) |
| void | removeSubComponent (std::string const &instance, bool warnIfNotFound=true) |
| std::shared_ptr< Comp > | getSubComponent (std::string const &instance) const |
| bool | isTopLevel () const |
| bool | initialized () const |
| std::string const & | className () const |
| std::string const & | instanceName () const |
| std::vector< std::string > | setParamVal (std::string const ¶mdescriptor, T const &val) |
| void | setParamValUnique (std::string const ¶mdescriptor, T const &val) |
| std::vector< std::pair< std::string, T > > | getParamVal (std::string const ¶mdescriptor) const |
| T | getParamValUnique (std::string const ¶mdescriptor) const |
| std::vector< std::string > | setParamString (std::string const ¶mdescriptor, std::string const &val) |
| void | setParamStringUnique (std::string const ¶mdescriptor, std::string const &val) |
| std::vector< std::pair< std::string, std::string > > | getParamString (std::string const ¶mdescriptor) const |
| std::string | getParamStringUnique (std::string const ¶mdescriptor) const |
| void | freezeParam (std::string const ¶mdescriptor, bool doit) |
| void | freezeAllParams (bool doit) |
| void | hideParam (std::string const ¶mdescriptor, bool doit) |
| void | hideAllParams (bool doit) |
| std::string | descriptor () const |
| void | setParamsFromFile (std::string const &filename) |
| std::istream & | setParamsFromStream (std::istream &is, std::string const &absfile) |
| virtual void | paramInfo (std::shared_ptr< UserInterface > s, std::map< std::string, std::string > &categs, bool skipFrozen, std::string const &cname="", std::string const &pfx="") |
| void | foreachParam (std::function< void(std::string const &compname, ParameterBase *p)> func, std::string const &cname="") |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ParameterCategory const &category) |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ValidValuesSpec< T > const &validValuesSpec, ParameterCategory const &category) |
| void | setDynamicParameterCallback (std::string const &name, std::function< void(T const &)> cb, bool callnow=true) |
| void | removeDynamicParameter (std::string const &name, bool throw_if_not_found=true) |
| void | setPath (std::string const &path) |
| std::filesystem::path | absolutePath (std::filesystem::path const &path="") |
| std::shared_ptr< Comp > | addSubComponent (std::string const &instance, Args &&...args) |
| void | removeSubComponent (std::shared_ptr< Comp > &component) |
| void | removeSubComponent (std::string const &instance, bool warnIfNotFound=true) |
| std::shared_ptr< Comp > | getSubComponent (std::string const &instance) const |
| bool | isTopLevel () const |
| bool | initialized () const |
| std::string const & | className () const |
| std::string const & | instanceName () const |
| std::vector< std::string > | setParamVal (std::string const ¶mdescriptor, T const &val) |
| void | setParamValUnique (std::string const ¶mdescriptor, T const &val) |
| std::vector< std::pair< std::string, T > > | getParamVal (std::string const ¶mdescriptor) const |
| T | getParamValUnique (std::string const ¶mdescriptor) const |
| std::vector< std::string > | setParamString (std::string const ¶mdescriptor, std::string const &val) |
| void | setParamStringUnique (std::string const ¶mdescriptor, std::string const &val) |
| std::vector< std::pair< std::string, std::string > > | getParamString (std::string const ¶mdescriptor) const |
| std::string | getParamStringUnique (std::string const ¶mdescriptor) const |
| void | freezeParam (std::string const ¶mdescriptor, bool doit) |
| void | freezeAllParams (bool doit) |
| void | hideParam (std::string const ¶mdescriptor, bool doit) |
| void | hideAllParams (bool doit) |
| std::string | descriptor () const |
| void | setParamsFromFile (std::string const &filename) |
| std::istream & | setParamsFromStream (std::istream &is, std::string const &absfile) |
| virtual void | paramInfo (std::shared_ptr< UserInterface > s, std::map< std::string, std::string > &categs, bool skipFrozen, std::string const &cname="", std::string const &pfx="") |
| void | foreachParam (std::function< void(std::string const &compname, ParameterBase *p)> func, std::string const &cname="") |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ParameterCategory const &category) |
| std::shared_ptr< DynamicParameter< T > > | addDynamicParameter (std::string const &name, std::string const &description, T const &defaultValue, ValidValuesSpec< T > const &validValuesSpec, ParameterCategory const &category) |
| void | setDynamicParameterCallback (std::string const &name, std::function< void(T const &)> cb, bool callnow=true) |
| void | removeDynamicParameter (std::string const &name, bool throw_if_not_found=true) |
| void | setPath (std::string const &path) |
| std::filesystem::path | absolutePath (std::filesystem::path const &path="") |
| Public Member Functions inherited from jevois::ParameterRegistry | |
| virtual | ~ParameterRegistry () |
Protected Attributes | |
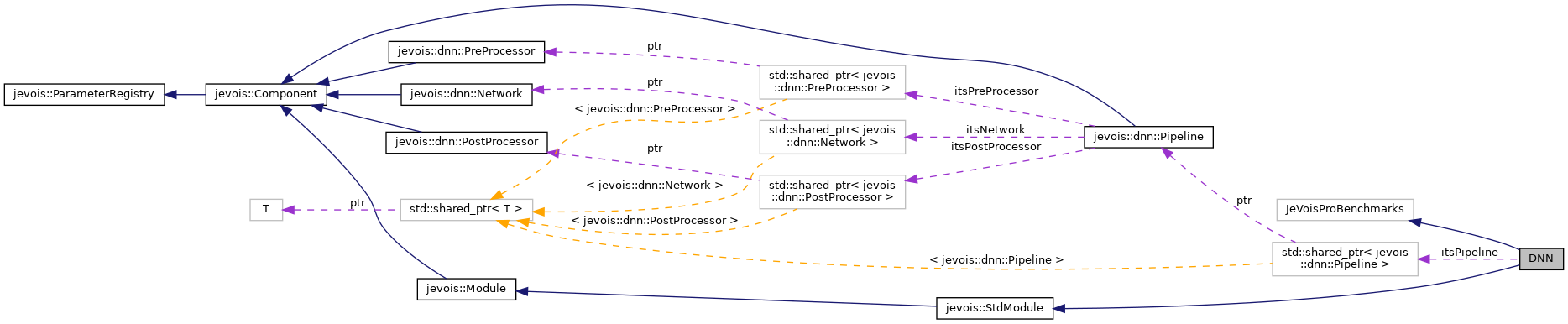
| std::shared_ptr< jevois::dnn::Pipeline > | itsPipeline |
Additional Inherited Members | |
| Protected Member Functions inherited from jevois::StdModule | |
| void | sendSerialMarkStart () |
| void | sendSerialMarkStop () |
| std::string | getStamp () const |
| Protected Member Functions inherited from jevois::Component | |
| virtual void | preInit () |
| virtual void | postInit () |
| virtual void | preUninit () |
| virtual void | postUninit () |
| virtual void | preInit () |
| virtual void | postInit () |
| virtual void | preUninit () |
| virtual void | postUninit () |
| Protected Member Functions inherited from jevois::ParameterRegistry | |
| void | addParameter (ParameterBase *const param) |
| void | removeParameter (ParameterBase *const param) |
| void | callbackInitCall () |
Detect and recognize multiple objects in scenes using OpenCV, NPU, TPU, or VPU Deep Neural Nets.
This module runs a deep neural network using the OpenCV DNN library. Classification networks try to identify the whole object or scene in the field of view, and return the top scoring object classes. Detection networks analyze a scene and produce a number of bounding boxes around detected objects, together with identity labels and confidence scores for each detected box. Semantic segmentation networks create a pixel-by-pixel mask which assigns a class label to every location in the camera view.
To select a network, see parameter pipe of component Pipeline.
The following keys are used in the JeVois-Pro GUI (pipe parameter of Pipeline component):
For expected network speed, see JeVois-Pro Deep Neural Network Benchmarks
For classification networks, when object classes are found with confidence scores above thresh, a message containing up to top category:score pairs will be sent per video frame. Exact message format depends on the current serstyle setting and is described in Standardized serial messages formatting. For example, when serstyle is Detail, this module sends:
DO category:score category:score ... category:score
where category is a category name (from namefile) and score is the confidence score from 0.0 to 100.0 that this category was recognized. The pairs are in order of decreasing score.
See Standardized serial messages formatting for more on standardized serial messages, and Helper functions to convert coordinates from camera resolution to standardized for more info on standardized coordinates.
For object detection networks, when detections are found which are above threshold, one message will be sent for each detected object (i.e., for each box that gets drawn when USB outputs are used), using a standardized 2D message:
id: the category of the recognized object, followed by ':' and the confidence score in percentx, y, or vertices: standardized 2D coordinates of object center or cornersw, h: standardized object sizeextra: any number of additional category:score pairs which had an above-threshold score for that boxSee Standardized serial messages formatting for more on standardized serial messages, and Helper functions to convert coordinates from camera resolution to standardized for more info on standardized coordinates.
|
inline |
|
inlinevirtual |
|
inline |
Processing function implementation.
Definition at line 117 of file DNN.C.
References jevois::InputFrame::getp(), and itsPipeline.
|
inlineoverridevirtual |
Processing function, no video output.
Reimplemented from jevois::Module.
Definition at line 130 of file DNN.C.
References doprocess().
|
inlineoverridevirtual |
Processing function with zero-copy and GUI on JeVois-Pro.
Reimplemented from jevois::Module.
Definition at line 164 of file DNN.C.
References doprocess(), jevois::GUIhelper::drawInputFrame(), jevois::GUIhelper::endFrame(), h, jevois::GUIhelper::iinfo(), jevois::Timer::start(), jevois::GUIhelper::startFrame(), and jevois::Timer::stop().
|
inlineoverridevirtual |
Processing function with video output to USB on JeVois-A33.
Reimplemented from jevois::Module.
Definition at line 138 of file DNN.C.
References doprocess(), jevois::RawImage::fmt, h, jevois::RawImage::height, jevois::rawimage::paste(), jevois::RawImage::require(), and jevois::RawImage::width.
|
protected |
Definition at line 193 of file DNN.C.
Referenced by DNN(), and doprocess().
 1.9.8
1.9.8
