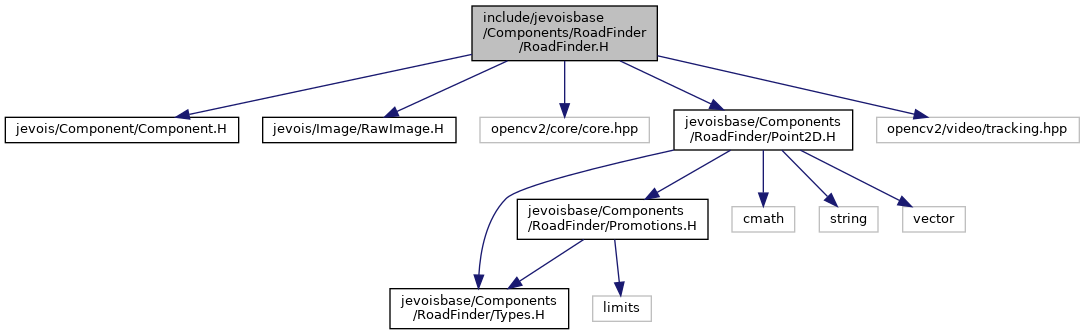
#include <jevois/Component/Component.H>
#include <jevois/Image/RawImage.H>
#include <opencv2/core/core.hpp>
#include <jevoisbase/Components/RoadFinder/Point2D.H>
#include <opencv2/video/tracking.hpp>
Go to the source code of this file.
|
| struct | Segment |
| | a segment is defined by the two end-points More...
|
| |
| struct | VanishingPoint |
| | Keeps all the supporting information about a specific vanishing point. More...
|
| |
| struct | Line |
| | keeps all the ready to use information of a supporting line as it pertains to describing the road More...
|
| |
| struct | RoadModel |
| | Store information about the road. More...
|
| |
| class | RoadFinder |
| | Navigation by finding road. More...
|
| |
◆ INVT_TYPEDEF_INT64
| #define INVT_TYPEDEF_INT64 |
◆ INVT_TYPEDEF_UINT64
| #define INVT_TYPEDEF_UINT64 |
 1.9.8
1.9.8
