|
JeVois Tutorials
1.23
JeVois Smart Embedded Machine Vision Tutorials
|

|
|

Loading...
Searching...
No Matches
|
JeVois Tutorials
1.23
JeVois Smart Embedded Machine Vision Tutorials
|
|
|
JeVois v1.9.0
In this tutorial, we program an Arduino to decode the results of JeVois modules that detect and identify multiple object in scenes, sending one message with information about the bounding box, object category, and recognition score for each detection.
Example modules with these outputs are DarknetYOLO, TensorFlowSaliency, DetectionDNN, and DarknetSaliency.
This tutorial directly builds on JeVois + Arduino: blink for X, which you go through first.
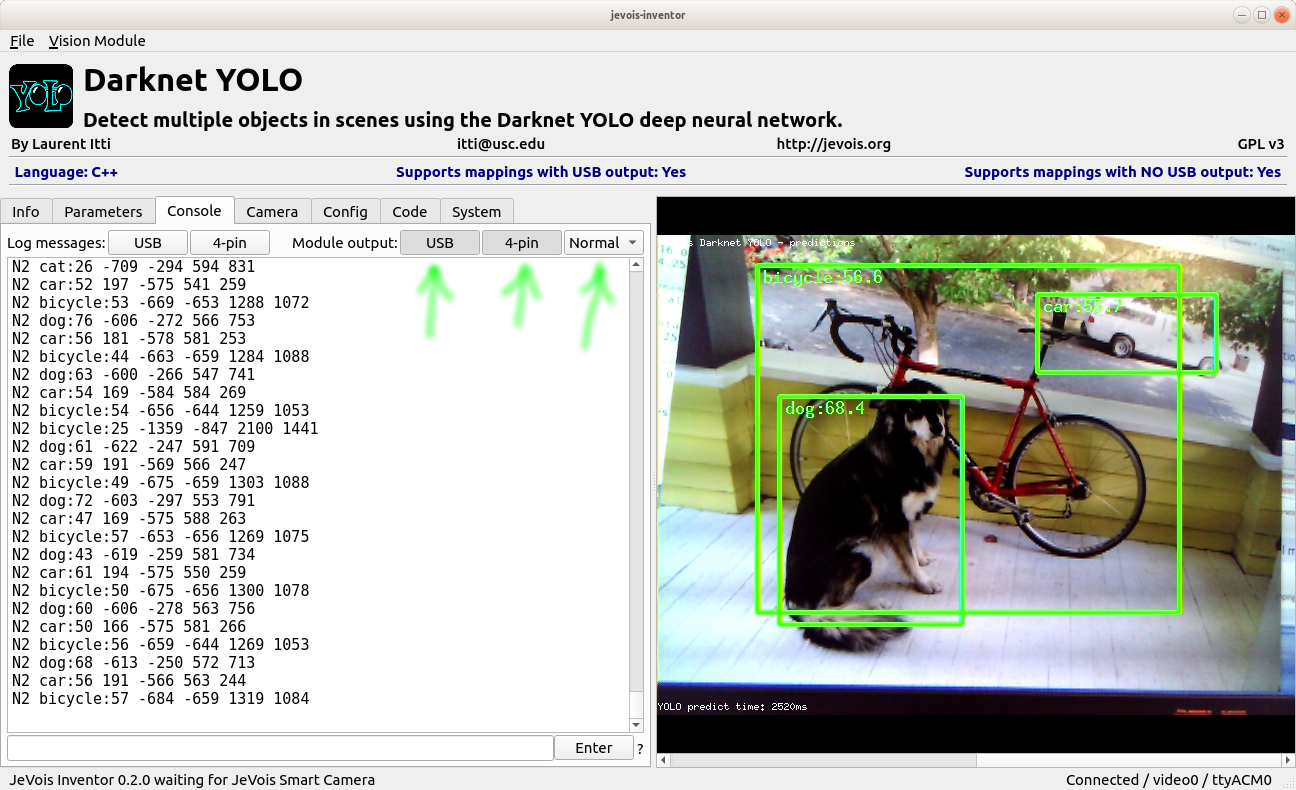
serstamp which can be set to pre-pend a frame number to each serial message. We will not use this here.N2 category:score left top width height
Note that the coordinates are in the JeVois standardized coordinates system described in Helper functions to convert coordinates from camera resolution to standardized, where:
This is so that detections reported by JeVois are independent of the camera resolution at which JeVois is grabbing frames (e.g., 320x240 or 640x480).
serprec described in Standardized serial messages formatting, you can get more precise floating-point values (e.g., try setpar serprec 3 in the Console of JeVois Inventor). For the code below, we will assume floating point values which could be integers as well.We will use a state machine approach as in JeVois + Arduino: blink for X, just now it has a few more states because we have a total of 6 tokens to decode for each message.
For the sake of developing a non-trivial example, let's say we want to turn on the LED of the Arduino when we detect a dog at least 200 units wide (i.e., the bounding box around the dog should be at least as wide as 1/10th of the field of view, and the full field of view is 2000 standardized units wide as explained above).
We extend the state machine code developed in JeVois + Arduino: blink for X as follows:
A few notes:
serprec, hence we use atof() to decode them.Compile and upload the code to your Arduino and here you go!
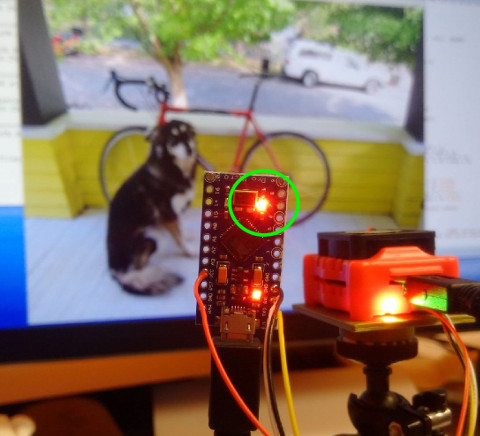
Woohoo, the LED turns on when JeVois detects a dog that is big enough!
Note that in scenes where JeVois also detects other things, the code as written will turn off the LED. So it may only briefly blink if something else is detected (e.g., the bicycle in the above scene) just after the dog is.
Check out these other tutorials. They use similar state machine decoding:
 1.9.8
1.9.8